
公式挂了

85924
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%7B%22type%22%3A%22post%22%2C%22targetId%22%3A%22883716%22%2C%22notes%22%3A%5B%5D%7D%2C%7B%22type%22%3A%22post%22%2C%22targetId%22%3A%22883717%22%2C%22notes%22%3A%5B%5D%7D%2C%7B%22type%22%3A%22post%22%2C%22targetId%22%3A%22883718%22%2C%22notes%22%3A%5B%5D%7D%2C%7B%22type%22%3A%22post%22%2C%22targetId%22%3A%22883723%22%2C%22notes%22%3A%5B%5D%7D%2C%7B%22type%22%3A%22post%22%2C%22targetId%22%3A%22883725%22%2C%22notes%22%3A%5B%5D%7D%5D%2C%22pid%22%3A%22883716%22%2C%22tid%22%3A%2285924%22%2C%22mainForumsId%22%3A%5B%22366%22%2C%22202%22%5D%2C%22categoriesId%22%3A%5B%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
卫星姿态动力学实时可视化仿真【exe程序+说明+源码】
中文摘要
不久前写的卫星仿真代码,被老师拿去给本科生上课教学了,拿出来分享一下。
关键词
卫星航天动力学仿真
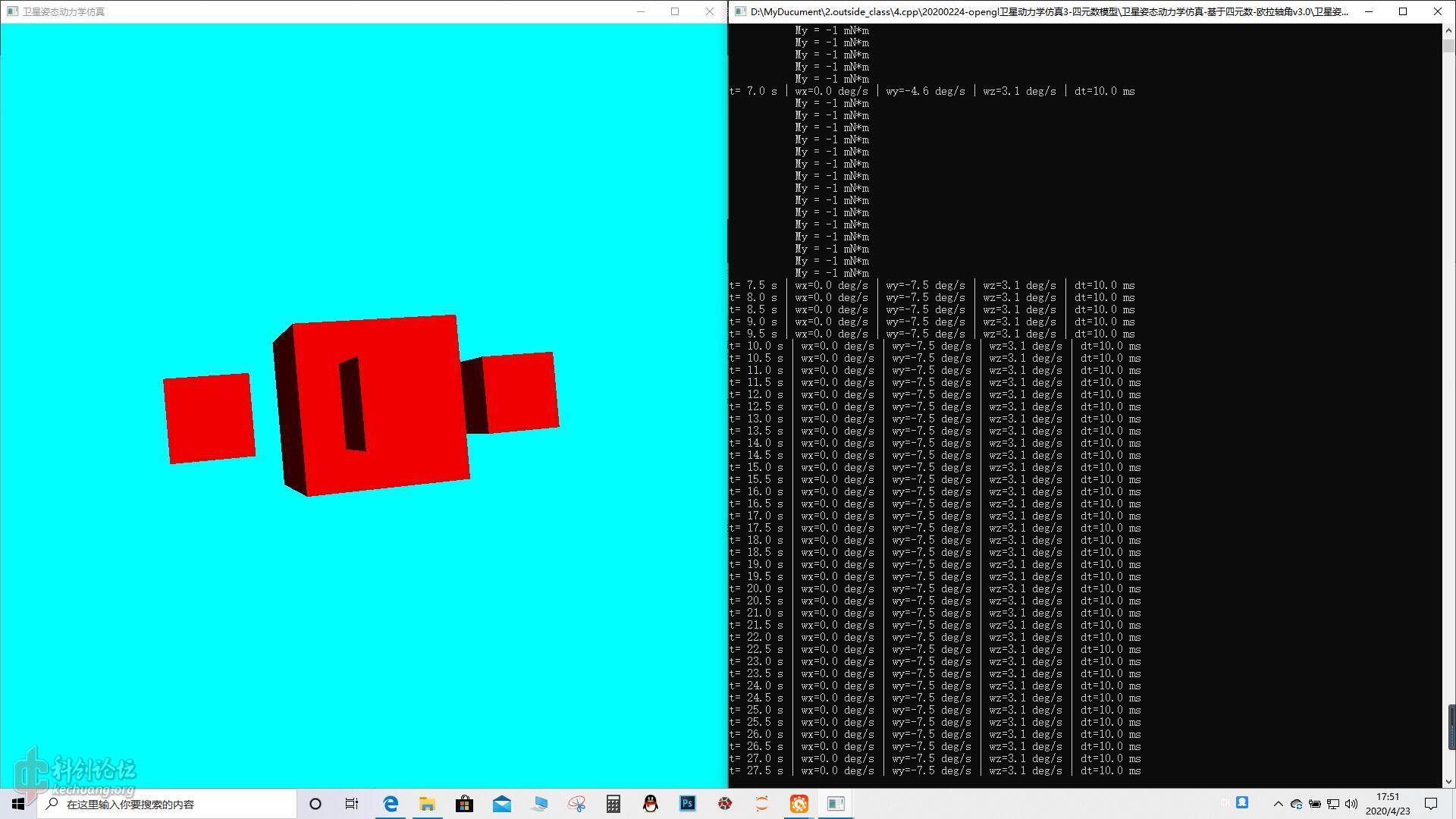
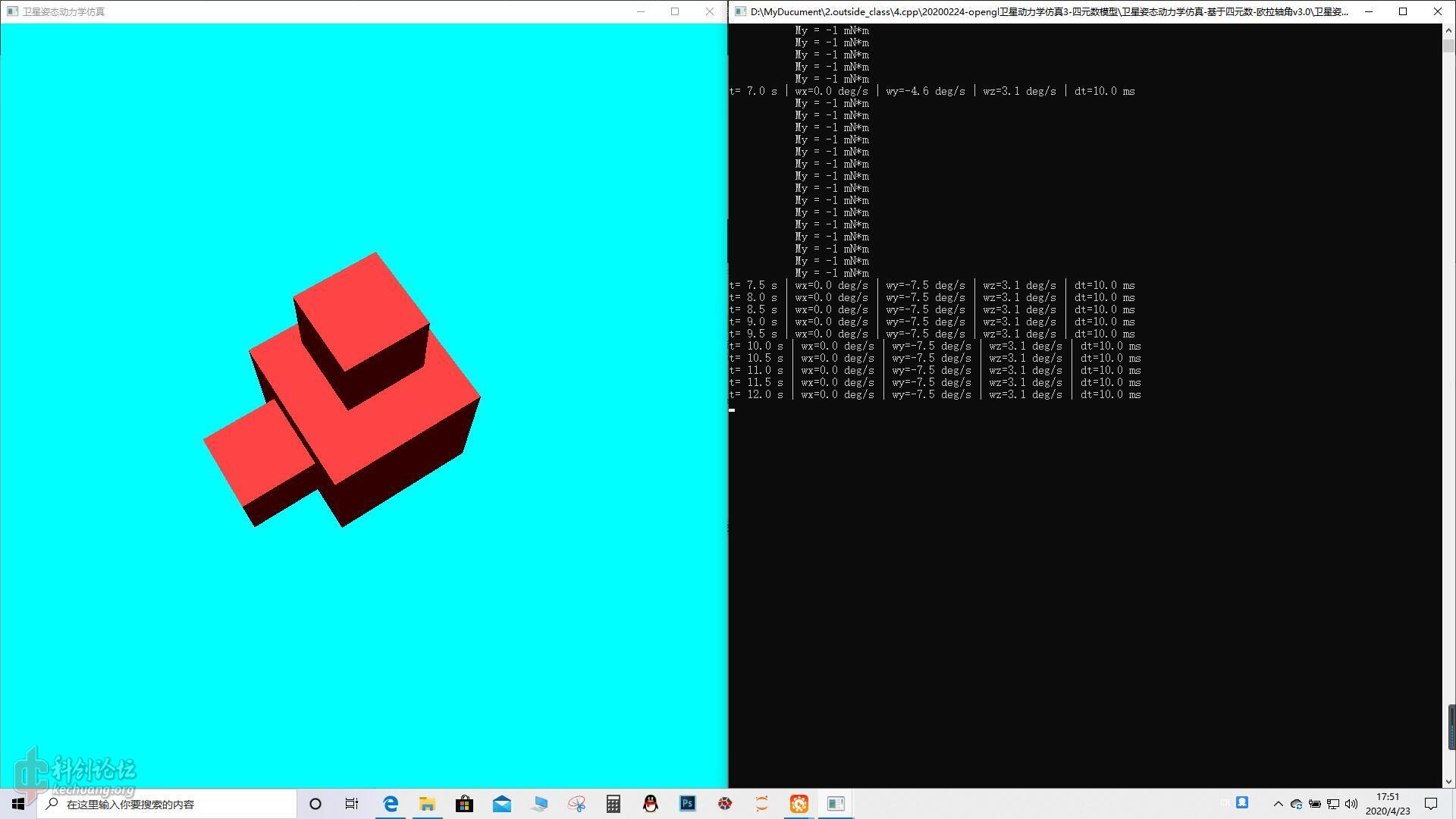
1、程序运行效果
选中三维动画窗口,切换英文输入法,WADSER控制卫星三轴力矩。右图为实时动力学数值仿真结果,左图根据仿真结果进行绘图。
运行截图

运行动画

2、仿真说明
卫星的动力学模型如下
\[\left \{ \begin{aligned} &\dot{w_x}=[M_x-(I_z-I_y)\cdot w_y\cdot w_z]/I_x\\ &\dot{w_y}=[M_y-(I_x-I_z)\cdot w_x\cdot w_z]/I_y\\ &\dot{w_z}=[M_z-(I_y-I_x)\cdot w_y\cdot w_x]/I_z \end{aligned} \right.\]
姿态角变化很大,欧拉角、方向余弦矩阵有奇异。这里采用四元数、欧拉轴角参数。运动学模型如下,
\[\begin{bmatrix}\dot{q_0} \\ \dot{q_1} \\ \dot{q_2}\\ \dot{q_3}\end{bmatrix} =\frac{1}{2}\begin{bmatrix} &q_0 &-q_1 &-q_2 &-q_3\\ &q_1 &q_0 &-q_3 &q_2\\ &q_2 &q_3 &q_0 &-q_1\\ &q_3 &-q_2 &q_1 &q_0 \end{bmatrix} \begin{bmatrix} &0 \\ &w_x+2(q_1q_2+q_3q_0)w_0 \\ &w_y+(q_0^2-q_1^2+q_2^2-q_3^2)w_0\\ &w_z+2(q_2q_3-q_1q_0)w_0 \end{bmatrix}\]
圆轨道卫星绕地球运转的角速度
$$w_0=\sqrt{\frac{\mu_e}{(R+H)^3}}$$
式中:
$w_0$,卫星绕地球公转的角速度
$H$,卫星轨道高度
$R$,地球半径
$Q=[q_0,q_1,q_2,q_3]^T$,卫星本体坐标系相对于地心惯性坐标系的姿态四元数;
${I_x,I_y,I_z}$,卫星的三个主轴转动惯量;
${M_x,M_y,M_z}$,卫星受到的沿着三个体坐标轴的力矩。
数值积分方法:四阶龙格库塔
绘图方法:OPENGL、欧拉轴/角参数
3、exe程序

4、源码
动力学模型部分
weixing.cpp
#include"weixing.h"
#include <math.h>
//微分方程结构体
ST_ROCKET rocket={0.0f,0.0f,0.0f,0.0f,{0,0,0,1.0f,0.0f,0.0f,0.0f},{0.0f}};
float SIM_DT = 0.01f; //仿真步长时间s
/******************************************************************************************************************************************************************************************
内容:动力学微分方程(四元数)
输入:Y-状态,t-时间
输出:dy-状态变化率
备注:Y=[0 WX rad/s, 1 WY rad/s, 2 WZ rad/s, 3 q0, 4 q1, 5 q2 ,6 q3] ,注意初始值q0=1
**************************************************************************************************************************************************************************************************/
void daodan(ST_ROCKET *pst)
{
//模型参数
const float Ix=0.005f*1.0f;//x轴转动惯量kg*m^2
const float Iy=0.005f*2.0f;//y轴转动惯量kg*m^2
const float Iz=0.005f*2.0f;//z轴转动惯量kg*m^2
const float H=600E3;//卫星圆轨道高度m
const float R=6373e3;//地球赤道半径m
const float mu=3.986e14;//地球引力常数
const float w0=sqrt(mu/((R+H)*(R+H)*(R+H)));//卫星轨道角速度rad/s
//double w0=1.08474e-3;
//w0= sqrt(2.0f);//卫星轨道角速度rad/s
//控制参数
float Mx=0;
float My=0;
float Mz=0;
Mx=pst->Mx;
My=pst->My;
Mz=pst->Mz;
// if(pst->t<1.0f)
// {
// Mx=0.01f;
// My=0.01f;
// Mz=0.01f;
// }
// else
// {
// Mx=0;
// My=0;
// Mz=0;
// }
//动力学模型
float temp = sqrt( pst->Y[3]*pst->Y[3] + pst->Y[4]*pst->Y[4] + pst->Y[5]*pst->Y[5] + pst->Y[6]*pst->Y[6] ); //四元数的归一化
pst->Y[3]=pst->Y[3]/temp;
pst->Y[4]=pst->Y[4]/temp;
pst->Y[5]=pst->Y[5]/temp;
pst->Y[6]=pst->Y[6]/temp;
double A[4][4]={ {pst->Y[3], -pst->Y[4], -pst->Y[5], -pst->Y[6]},
{pst->Y[4], pst->Y[3], -pst->Y[6], pst->Y[5]},
{pst->Y[5], pst->Y[6], pst->Y[3], -pst->Y[4]},
{pst->Y[6], -pst->Y[5], pst->Y[4], pst->Y[3]} }; //四元数描述的运动学矩阵
double B[4]={ 0,
pst->Y[0] + w0 * 2.0F * ( pst->Y[4] *pst->Y[5] + pst->Y[6]* pst->Y[3] ),
pst->Y[1] + w0 * ( pst->Y[3]*pst->Y[3] - pst->Y[4]*pst->Y[4] + pst->Y[5]*pst->Y[5] - pst->Y[6]*pst->Y[6] ),
pst->Y[2] - w0 * 2.0F * ( pst->Y[5] *pst->Y[6] - pst->Y[4]* pst->Y[3] ) }; //卫星相对惯性系的角速度
pst->dy[0] = ( Mx - ( Iz - Iy ) * pst->Y[1] * pst->Y[2] ) / Ix;
pst->dy[1] = ( My - ( Ix - Iz ) * pst->Y[2] * pst->Y[0] ) / Iy;
pst->dy[2] = ( Mz - ( Iy - Ix ) * pst->Y[0] * pst->Y[1] ) / Iz; //外力引起的星体坐标系下的角加速度
pst->dy[3] = A[0][0] * B[0] + A[0][1] * B[1] + A[0][2] * B[2] + A[0][3] * B[3];
pst->dy[4] = A[1][0] * B[0] + A[1][1] * B[1] + A[1][2] * B[2] + A[1][3] * B[3];
pst->dy[5] = A[2][0] * B[0] + A[2][1] * B[1] + A[2][2] * B[2] + A[2][3] * B[3];
pst->dy[6] = A[3][0] * B[0] + A[3][1] * B[1] + A[3][2] * B[2] + A[3][3] * B[3]; //轨道坐标系下的姿态角速度(四元数描述)
}
/**************************************************************************************************************************************************************************
内容:四阶龙格库塔积分函数
输入:t-当前时间,Y[]-当前帧状态参数
输出:重新计算下一帧的状态参数,写入Y[]中
备注:每调用一次,更新一次(t,Y[])。使用四阶龙格库塔积分进行一步递推,根据当前状态,计算出下一刻的状态,更新t和Y[]。
**************************************************************************************************************************************************************************************************/
void my_ode45(ST_ROCKET* pst)
{
UCHAR8 i;
ST_ROCKET rocket1=*pst;
ST_ROCKET rocket2=*pst;
ST_ROCKET rocket3=*pst;
ST_ROCKET rocket4=*pst;
//k1=f(t,yn)
daodan(&rocket1);
//k2=f(t+0.5*h,yn+0.5*h*k1)
for(i=0;i<ROCKET_DEMENTION;i++)
{
rocket2.Y[i]+=0.5f*SIM_DT*rocket1.dy[i];
}
rocket2.t+=0.5f*SIM_DT;
daodan(&rocket2);
//k3=f(t+0.5*h,yn+0.5*h*k2)
for(i=0;i<ROCKET_DEMENTION;i++)
{
rocket3.Y[i]+=0.5f*SIM_DT*rocket2.dy[i];
}
rocket3.t+=0.5f*SIM_DT;
daodan(&rocket3);
//k4=f(t+h,yn+h*k3)
for(i=0;i<ROCKET_DEMENTION;i++)
{
rocket4.Y[i]+=SIM_DT*rocket3.dy[i];
}
rocket4.t+=SIM_DT;
daodan(&rocket4);
//y(n+1)=1/6*(k1+2k2+2k3+k4)
for(i=0;i<ROCKET_DEMENTION;i++)
{
pst->Y[i] += SIM_DT * ( rocket1.dy[i] + 2.0f*rocket2.dy[i] + 2.0f*rocket3.dy[i] + rocket4.dy[i] ) / 6.0f;
}
pst->t+=SIM_DT;
}
/******************************************************************************************************************************************************************************************
内容:符号函数
输入:FP32 x
输出:UCHAR8 +1 or -1
备注:大于零输出1,小于零输出-1
**************************************************************************************************************************************************************************************************/
UCHAR8 sign(FP32 x)
{
if(x>0)
return 1;
else
return 0;
}weixing.h
#ifndef _WEIXING_H_
#define _WEIXING_H_
#include <math.h>
#include "main.h"
//#define SIM_DT 0.021F //仿真步长s
#define ROCKET_DEMENTION 7 //微分方程的维数
extern float SIM_DT;
//微分方程结构体-火箭微分方程当前的参数
typedef struct{
//控制输入
float Mx;//x轴力矩N*m
float My;//y轴力矩N*m
float Mz;//z轴力矩N*m
//状态输入
FP32 t;//当前时间s
FP32 Y[ROCKET_DEMENTION];//当前状态Y=[0 WX rad/s, 1 WY rad/s, 2 WZ rad/s, 3滚转角rad, 4偏航角rad, 5俯仰角rad]
//状态输出
FP32 dy[ROCKET_DEMENTION];//当前状态变化率dy=dY/dt
}ST_ROCKET;
//函数声明
extern void daodan(ST_ROCKET *pst);
extern void my_ode45(ST_ROCKET* pst);
extern UCHAR8 sign(FP32 x);
//全局变量声明
extern ST_ROCKET rocket;
#endif // _WEIXING_H_主函数
main.cpp
#include"main.h"
double a=0.0f;
double b=0.0f;
double c=5.0f;
UINT32 gl_cnt,gl_fps;
UINT32 systime;
UINT32 my_cnt;
//定时器中断100Hz
VOID CALLBACK myTimerProc1(HWND hwnd, UINT uMsg, UINT idEvent, DWORD dwTime )
{
//卫星动力学模型
my_ode45(&rocket);
gl_cnt++;
systime++;
if(systime>50)
{
systime=0;
gl_fps=gl_cnt;
gl_cnt=0;
my_cnt++;
printf("t= %.1f s | wx=%.1f deg/s | wy=%.1f deg/s | wz=%.1f deg/s | dt=%.1f ms\n",
my_cnt*50*(float)SIM_DT, rocket.Y[0]*57.3f, rocket.Y[1]*57.3f, rocket.Y[2]*57.3f,SIM_DT*1000);
rocket.Mx=0;
rocket.My=0;
rocket.Mz=0;
}
}
/****************************************************************************************************************************************************************************
*函数名:main
*功能:主函数
*备注:
*****************************************************************************************************************************************************************************************************************/
int main(int argc, char *argv[])
{
printf("*******************************************************************************************************************************\n");
printf("【1】鼠标选中卫星画面,切换英文输入法,通过按键施加力矩控制卫星\n");
printf("【2】施加力矩:W-A-D-S-E-R\n");
printf("【3】仿真步长:+ -\n");
printf("【4】复位姿态:N\n");
printf("【5】退出程序:Q\n");
printf("【6】惯量主轴与体坐标系重合,参数Ix=0.005kg*m^2,Iy=6*Ix,Iz=4*Ix,基于四元数解算运动学模型。w=[Wx,Wy,Wz]'为体坐标系下角速度。2020/02\n");
printf("*******************************************************************************************************************************\n");
//开定时器中断,数值仿真
SetTimer(NULL,0,(UINT32)(1000*SIM_DT),myTimerProc1);//间隔时间SIM_DT ms
//openGL绘图
my_opengl_task(argc, argv);
return EXIT_SUCCESS;
}opengl可视化部分
opengl.cpp
#include "main.h"
int slices=16;
int stacks=16;
const GLfloat light_ambient[] = { 0.0f, 0.0f, 0.0f, 1.0f };
const GLfloat light_diffuse[] = { 1.0f, 1.0f, 1.0f, 1.0f };
const GLfloat light_specular[] = { 1.0f, 1.0f, 1.0f, 1.0f };
const GLfloat light_position[] = { 2.0f, 5.0f, 5.0f, 0.0f };
const GLfloat mat_ambient[] = { 0.7f, 0.7f, 0.7f, 1.0f };
const GLfloat mat_diffuse[] = { 0.8f, 0.8f, 0.8f, 1.0f };
const GLfloat mat_specular[] = { 1.0f, 1.0f, 1.0f, 1.0f };
const GLfloat high_shininess[] = { 100.0f };
/****************************************************************************************************************************************************************************
*函数名:my_opengl_task
*功能:penGL程序的入口
*备注:
*****************************************************************************************************************************************************************************************************************/
void my_opengl_task(int argc, char *argv[])
{
glutInit(&argc, argv);
//创建窗口
glutInitWindowSize(640,480);//大小
glutInitWindowPosition(10,10);//左上角的坐标
glutInitDisplayMode(GLUT_RGB | GLUT_DOUBLE | GLUT_DEPTH);
glutCreateWindow("卫星姿态动力学仿真");
//penGL中断服务函数
glutReshapeFunc(resize);
glutDisplayFunc(display);
glutKeyboardFunc(key);
glutIdleFunc(idle);
//场景光照等设置
glClearColor(0,1,1,1);
glEnable(GL_CULL_FACE);
glCullFace(GL_BACK);
glEnable(GL_DEPTH_TEST);
glDepthFunc(GL_LESS);
glEnable(GL_LIGHT0);
glEnable(GL_NORMALIZE);
glEnable(GL_COLOR_MATERIAL);
glEnable(GL_LIGHTING);
glLightfv(GL_LIGHT0, GL_AMBIENT, light_ambient);
glLightfv(GL_LIGHT0, GL_DIFFUSE, light_diffuse);
glLightfv(GL_LIGHT0, GL_SPECULAR, light_specular);
glLightfv(GL_LIGHT0, GL_POSITION, light_position);
glMaterialfv(GL_FRONT, GL_AMBIENT, mat_ambient);
glMaterialfv(GL_FRONT, GL_DIFFUSE, mat_diffuse);
glMaterialfv(GL_FRONT, GL_SPECULAR, mat_specular);
glMaterialfv(GL_FRONT, GL_SHININESS, high_shininess);
//penGL绘图主循环,直到窗口关闭时退出
glutMainLoop();
}
/****************************************************************************************************************************************************************************
*函数名:resize
*功能:窗口改变的中断服务函数
*备注:在openGL程序入口,把他的指针传给中断服务函数
*****************************************************************************************************************************************************************************************************************/
void resize(int width, int height)
{
const float ar = (float) width / (float) height;
glViewport(0, 0, width, height);
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
glFrustum(-ar, ar, -1.0, 1.0, 2.0, 100.0);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity() ;
}
/****************************************************************************************************************************************************************************
*函数名:display
*功能:penGL绘图中断服务函数,主要的绘图函数
*备注:在openGL程序入口,把他的指针传给中断服务函数
*****************************************************************************************************************************************************************************************************************/
void display(void)
{
//根据四元数计算欧拉轴角参数
float phi2=acos(rocket.Y[3]);
float phi=2.0f*phi2*57.3f; //欧拉轴角-角度
float temp=sin(phi2);
float ex=rocket.Y[4]/temp; //欧拉轴-轴方向
float ey=rocket.Y[5]/temp;
float ez=rocket.Y[6]/temp;
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glColor3d(1,0,0);
//绘制立方体
glPushMatrix();
glTranslated(0,0,-c);//平移
glRotated(phi,ex,ey,ez);//旋转
//绘制卫星
if(1)//实体
{
glutSolidCube(1.0f);//立方体
glTranslated(0,0,0.75f);//画镜筒
glutSolidCube(0.5f);
glTranslated(1.0f,0,-0.75f);//画太阳帆
glutSolidCube(0.5f);
glTranslated(-2.0f,0,0);//画太阳帆
glutSolidCube(0.5f);
}
else//线框
{
glutWireCube(1.0f);
glTranslated(0,0,0.75f);//画镜筒
glutWireCube(0.5f);
glTranslated(1.0f,0,-0.75f);//画太阳帆
glutWireCube(0.5f);
glTranslated(-2.0f,0,0);//画太阳帆
glutWireCube(0.5f);
}
//glutSolidCube(1.0f);//立方体
//glutSolidCone(1.0f, 1.0f,slices,stacks);//圆锥
//glutSolidTorus(0.2,0.8,slices,stacks);//圆环
glPopMatrix();
//输入缓冲区
glutSwapBuffers();
}
/****************************************************************************************************************************************************************************
*函数名:key
*功能:penGL按键中断服务函数,主要的按键响应
*备注:在openGL程序入口,把他的指针传给中断服务函数
*****************************************************************************************************************************************************************************************************************/
void key(unsigned char key, int x, int y)
{
switch (key)
{
case 27 :
case 'q':
exit(0);
break;
case '+':
//c+=0.01f;
SIM_DT+=0.001f;
break;
case '-':
//c-=0.01f;
SIM_DT-=0.001f;
break;
//a
case 'e':
rocket.Mx=0.001f;
printf("Mx = 1 mN*m\n");
break;
case 'r':
rocket.Mx=-0.001f;
printf("Mx = -1 mN*m\n");
break;
//b
case 'a':
rocket.My=0.001f;
printf(" My = 1 mN*m\n");
break;
case 'd':
rocket.My=-0.001f;
printf(" My = -1 mN*m\n");
break;
//c
case 'w':
rocket.Mz=0.001f;
printf(" Mz = 1 mN*m\n");
break;
case 's':
rocket.Mz=-0.001f;
printf(" Mz = -1 mN*m\n");
break;
case 'n':
for(UCHAR8 i=0;i<ROCKET_DEMENTION;i++)
{
rocket.dy[i]=0;
rocket.Y[i]=0;
}
rocket.Y[3]=1.0f;
SIM_DT=0.021f;
break;
default:
break;
}
//printf("Mx=%.1f mN*m| My=%.1f mN*m | Mz=%.1f mN*m\n",rocket.Mx*1000,rocket.My*1000,rocket.Mz*1000);
glutPostRedisplay();
}
/****************************************************************************************************************************************************************************
*函数名:idle
*功能:penGL按键中断服务函数,主要的按键响应
*备注:在openGL程序入口,把他的指针传给中断服务函数
*****************************************************************************************************************************************************************************************************************/
void idle(void)
{
glutPostRedisplay();
}opengl.h
#ifndef _OPENGL_H_
#define _OPENGL_H_
#include <GL/glut.h>
#include <GL/gl.h>
#include <GL/glu.h>
extern void my_opengl_task(int argc, char *argv[]);
extern void resize(int width, int height);
extern void sysTick(void);
extern void display(void);
extern void key(unsigned char key, int x, int y);
extern void idle(void);
extern int slices;
extern int stacks;
#endif // _OPENGL_H_[修改于 4年7个月前 - 2020/07/27 17:30:08]
后续的改进方向
(1)加上干扰力矩模型。
(2)加上地球磁场模型、磁力矩器模型、飞轮模型,编写三轴姿态控制算法、飞轮卸载算法。
(3)转移到ubuntu平台开发。使用QT开发上位机,方便调参,类似MIT Mini Cheetah开源代码。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。





忆昔长别
 进士 学者 机友 笔友
进士 学者 机友 笔友
相似文章推荐
200字以内,仅用于支线交流,主线讨论请采用回复功能。