5/14日
今天把布线乱乱的炮台走线规范了下,许多在连接线上的搭棚电路都移到了洞洞板和前部装甲板上,顺便接上了3级测试了一下。。。。
速度惨不忍睹。。。。本来2级加速就有33+的速度现在跌到了27左右,3级加速出膛速度才38.。。。。。与预想的45出膛速度相差甚远,效率只有2%,整整跌掉30%
原来是单片机IO口直接输出没有基极限流驱动9012,电源到9012的发射极电阻式20欧,现在洞洞板上新焊的驱动电路加了限流,9012的发射级电阻换成了120欧,VCC都为5V,还有为了方便连接,把线圈到洞洞板的线延长了一段,然后乱乱的塞在了支架下边,不知道是不是这些原因引起的,只有明天把电路复原再试试了。
不过值得欣慰的是虽然出膛速度才38,但感觉力量也蛮足了,小纸箱2层贯穿还有较大余力,家里没有可乐罐无法测试能否击穿
PS:想问下有做过钢珠加速的TX,近距离击碎啤酒瓶大概需要多少的出膛速度或者多少动能啊?
============================
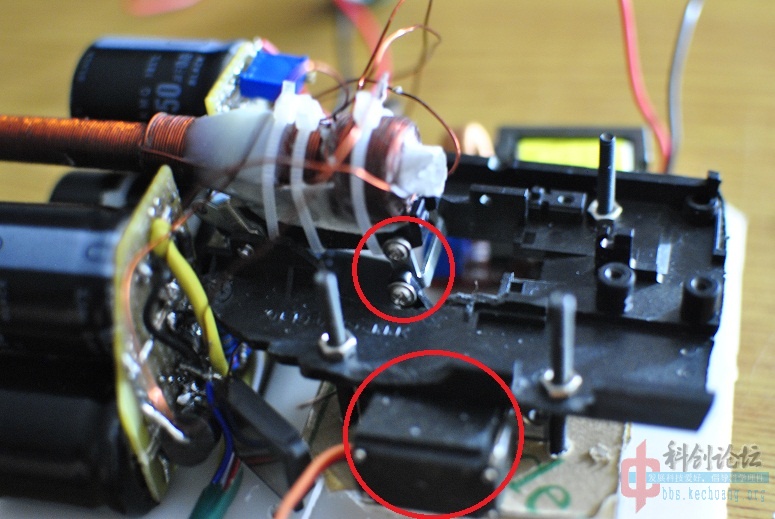
炮管部分
注意 别看那么长 其实只做了3级的加速线圈,就右边短短的一部分,其他的都是为了美观与出膛精准度,用线圈绕的炮管。。。。(没有实体炮管,直接线圈做炮管的)
参数为前两级450V300U第三级450V440U,前两级线圈测试充电到300V出膛速度在33~35左右,基本与模拟器结果相符,然后第三级也懒得试了,等整体完工后一同测试,预计300V电压3级出膛速度在40~45左右(对于玩具来说,我觉得这个速度够了,打人有点疼,但也不危险)
白白的部分是AB胶做的底座,方便固定用的
![_DSC0792.jpg]()
炮台部分
使用废旧的读卡器支架制作,现以完成俯仰角机构,使用9G舵机控制,角度在-10~45度左右,底座与六足链接的炮台旋转部分制作ing.....
6只电容(150u4只,220u2只)与可控硅和洞洞板组成前部装甲,感觉电容没必要藏起来,以后外壳也不包住电容,外露着彰显霸气。
ZVS使用坛子里TX淘宝的套件,自己稍微改装了下,现充电2秒,连发几十发炮弹ZVS各元件没有一点温度,准备封装在炮台内部不考虑散热了。
![_DSC0794.jpg]()
![_DSC0794.jpg]()
当当当当~~~
以下是我心爱的六足,善良登场~~~
暂时完成机械结构体,使用现成的舵机控制板,使用PS2手柄能实现爬行变形等动作,但感觉扩展性太小,准备自己重做控制部分,暂定使用PIC32MX795芯片
![_DSC0796.jpg]()
炮台模式
可怜现在那块3000MA的小电池,18只舵机已经对它造成较大压力,估计这个配置以后开炮的话只有这样趴着充电了。。。。不然估计一开炮腿就软了
![_DSC0797.jpg]()
战车模式
轮子还没装。。。。因为驱动板还没做,舵机控制办没有直流电机的输出口,装了也白装。。。。
变形之后所有舵机的静态电流只有几百毫安,通过轮子前进可以实现移动炮击功能
![_DSC0795.jpg]()
——————————华丽的分割线————————————
以上是暂时完成的部分
准备还要给小六足加上刷好openwrt的703无线路由与摄像头,炮管上安装激光瞄准器,这样就能通过手机,或者电脑网络在公司第一视角操作在家的六足炮击巡逻。。。应该蛮爽。。。
外壳部分现在只是简单的支架,等定型之后准备定做ABS板材拼装
炮管估计要重做,因为现在的炮管是当初搞试验的2级加速再接上第三级制作的,前两级的参数都是以两级紧密连续加速配置的,当三级用后能量有较大的浪费,希望重做之后能有50的初速我就觉得圆满了
还有自动装填装置,感觉应该蛮简单,因为发射的是钢珠,可使用较简单的机械结构完成装填,载弹量也可以做到几十上百发(就不知道电池够不够用。。。)









































200字以内,仅用于支线交流,主线讨论请采用回复功能。