[paragraph]
原载: 猫眼看天微信公众号
编者按:
上期的“
猫”眼看天专栏,我们介绍了在线的导航与任务设计,今天我们来详细说说在线的GNC技术。与地面的导航和任务设计相比,在线GNC技术效果更好,因为只有飞行器自身才最了解当前最新的各种情况;但挑战也更大,因为这对制导、导航和控制都提出了很高的处理要求,一方面飞行器上计算机的处理能力由于受到功耗、体积的限制以及对抗辐射的要求,其计算速度远低于地面计算机系统;另一方面,即使有些问题由地面中心的技术人员来处理也相当棘手,更不用说让飞行器去自主解决了。但是,对探测的需求已经发展到若是没有在线GNC几乎就无法完成任务这一层面,因此开展自主在线的GNC就显得十分迫切。
深空探测需要什么样的GNC技术?(二)
——在线的制导、导航与控制技术
作者:新流浪猫
在线的制导、导航与控制
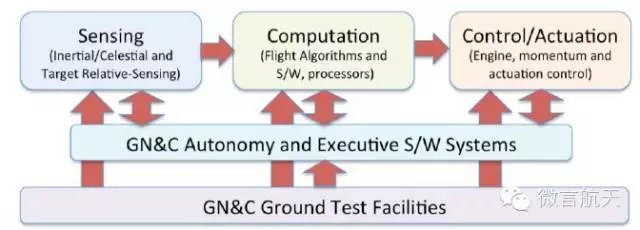
NASA将深空GNC的组成分为4个功能部分:传感、计算、控制/驱动以及地面测试,而融合这四部分功能的是GNC自主系统和执行软件。
1自主GNC技术所面临的未来任务
自主GNC技术所面临的未来任务主要包括:
- 在有较大重力和大气影响的天体表面着陆;
- 在有重力影响但没有大气的天体表面着陆;
- 在重力很小的小型天体表面着陆;
-
重力很小的小型天体接近操作; -
取样返回任务; -
上升,自主交会对接任务(AR&D); -
多目标的行星航行; -
行星轨道器; -
编队飞行、航天器集群、分布式飞行器系统; -
无重力条件下的碰撞-返回式(touch-and-go, TAG)接触。
这些任务对GNC的挑战在于:
-
地面辅助的时延长,不能满足任务需求; -
在探测所在地需实时性强的操作; -
面临未知和动态的环境; -
复杂的故障处理; -
更长寿命的任务时间。
2GNC自主系统和执行软件的组成与功能
图2 GNC自主系统和执行软件的组成与功能
图2细化了GNC自主系统和执行软件的组成与功能,GNC自主系统主要完成事件规划以及各类时序任务,提供不同功能间的逻辑和智能化相互联系等。-
传感,包括各种传感设备的使用以及危险检测功能; -
计算,基于各种数据源,估计当前的姿态轨迹,并计算未来的轨迹和姿态。内容包括:基于图像的导航(例如TRN)、姿态估计、轨道确定、危险检测与分析、姿态和路径控制、过程纠正等; -
控制/驱动,根据计算结果控制姿态和轨迹,包括驱动发动机,控制各种气动舵翼等。
在线GNC技术的典型任务
火星着陆
由于存在高动态的环境,较大的重力场,以及大气干扰,火星着陆的控制必须完全自主,以实现快速、闭环的姿态控制和轨迹规划及制导。在伞降段结束后的动力下降段,通过基于地标的导航、相对目标导航(TRN),将能确定距离目标点的距离,并实时规划大范围的调整轨迹,实施精确着落。现有的着陆技术由于大气的干扰导致降落点散布大(例如,火星上4-8km),这就需要较大的安全着陆区,且要满足着陆车漫行到探测点的需求。如果预先确定的着落区无法保证地形安全性的要求,需通过危险检测与避障(HDA)实施自主安全着陆。总之,火星着陆需要再入前的导航(以确定再入起点)、在线的基于地标的导航、TRN、燃料最优的大范围轨迹调整制导(路径规划)、HDA等紧密合作。
有重力影响但没有大气的天体表面着陆
例如月面着陆,因为没有大气的影响,可以从很高的轨道探测月面的情况,也不存在黑障。采用的技术包括基于地标的自主导航、TRN、HDA。与火星探测需求相同的是,探测器应能直接降落在被危险地形包围的探测点。
重力很小的小型天体表面着陆
在重力很小的情况下,可能要多次着落,因此存在再次上升的过程。一般不考虑大气影响,因此地标是容易辨识的,但仍需要复杂和实时的轨迹和姿态优化控制。在与表面接触时不能造成任何损坏,因为还需完成再次上升的过程,因此这类任务包含了再入(E)、下降(D)、着陆(L)和上升(A)全过程。它的难点还在于对小型天体缺乏足够的信息,有关地标和详细的重力模型很可能只有在接近该天体才逐步获取,有可能需要地面辅助。
在土卫六和金星上着陆
这两个星球尽管有很大差异,但是二者大气密度与重力场势能的比例较为类似,当降为亚音速后,再入轨迹相当慢,可以采用降落伞提供将近10多分钟的下降,这给制导带来了充足的时间。导航可以采用TRN、辐射计、来自地球的单向无线电数据和自身高精度的时钟(例如以前介绍的DSAC),或者利用在轨飞行器作为中继。
重力很小的小型天体接近 操作
其特点是低重力和缺乏大气,因此:
-
有足够的时间获取信息并对目标提取特征; -
可以缓慢下降到目标; -
存在多次着陆接触或上升; -
关键的事件可以中止或重启。
没有大气,减少了由此带来的不确定性和风的影响,可以采用基于地标的自主导航、TRN。但对于彗星,由于其向外析气,可能会影响上述导航效果。避免碰撞、避免喷射的物质、复杂的重力和动力学模型是任务的关键,同时避免发动机排出的推进剂干扰或污染天体表面,这将成为另一个GNC设计约束。
取样返回任务
此类任务的模式较多,例如
-
MSR火星取样返回。 -
TAG模式,软着陆和立即上升。 -
MSR-like类似于火星取样返回任务,直接返回至地球,需要在线的导航和制导控制,设计高效的燃料最优返回轨迹。 -
Dart-like类似于投射方式的取样,将样品喷射回等待的飞行器。 -
micro-sample-return利用电推进的小型卫星进行取样并返回地球。
多目标的星际航行
一般是低推进任务,配合使用电推进系统,需要很长的航行时间。
行星轨道器
轨道运行和伴飞要考虑辐射问题,而采用合适的控制算法能够维持健康的状态。
编队飞行和航天器集群
保持多个飞行器相对队形和维持一个集群的模式,是两项不同的操作。飞行器相对之间的几何关系精度,从毫米级至米级,前者可以采用飞行器之间的无线连接和红外通讯,后者应用到大量图像处理。对多个目标的同时观测和远程干涉观测是这类典型应用。
关键技术及其应用与优先级
图3给出了在线GNC关键技术,及其与不同任务的相关性:
图3 技术与任务的相关性分析
在这里从软硬件的层面将关键技术分为五大类,第1、2项技术主要涉及到算法和软件,第3、4项技术主要涉及到与传感器相关的硬件设施
-
以惯性技术为主的在线GNC技术,包括6自由度的制导与控制、非线性优化和路径规划技术、自主制导导航与控制系统、融合多源数据的集成GNC软件系统、低推进制导、太阳帆制导与控制等。 -
相对目标估计,包括相对目标定位和姿态预计、航空制导(aeroguidance)与控制、危险检测与避障、分布式飞行器集群控制、行星上的精确定位系统等。 -
相对目标传感,包括测高仪和测速仪、地形传感设备、危险检测传感器等; -
惯性-天体传感,包括“纳g”级的加速度计,精确定时等; -
其他GNC飞行设备,包括微小飞行器的GNC技术、抗辐射的GNC传感器和电子设备、大气制导控制机构、太阳帆控制机构、先进的在线计算等; -
地面测试设施,包括自由飞行推进测试平台(短时间)、实验室级6自由度仿真器、基于无人机的自由飞行平台(长时间)、高速再入/下降/着陆测试平台等。
将上述技术与未来十年的任务进行了相关性分析,用红、黄、绿表示相关性依次递减。这些任务就不再展开介绍了。
图4列出了两种维度下技术的优先级,其中“raw prioritization”是根据使用的频度来区分的,而“cost-moderated prioritization”是根据开发费用来区分的,还好两者比较接近:
图4 GNC技术的优先级分类
表中共性高优先级的任务包括:6自由度的制导与控制、非线性路径规划、集成化的GNC软件、目标相对定位和姿态估计,敏感极小引力(1X10-9g级别)的加速度计,先进的在线计算能力等。
在未来深空科学探测任务中,对“自主”(autonomous)或“自动化”(automated)控制的需求越发强烈,尽管二者的含义是有区别的,但在本文中的主要含义则是指无需地面人工辅助、完全由飞行器自行决定的制导、导航和控制,这主要是由高动态任务的特性决定的,天地之间链路的延时已不满足实时控制的需求,现场瞬息万变,需要飞行器自行及时响应,这将成为未来GNC的技术重点突破所在;并且始终将故障检测、定位与隔离(FDIR)作为研究重点(限于篇幅,本文未对FDIR进行过多介绍)。而当自主性不断增强,也许航天器的控制会逐步迈入智能化时代。
编后语:
对火星探测等经由大气下降的地外天体着落,GNC将起着非常关键的作用。由于伞降是减速的有效手段而被这类任务广泛采用,但伞降的不确定性也带来了后续动力下降段初始条件(速度、位置、姿态)的不确定性,需要大范围的在线轨迹重优化工作。虽然人类已有飞行器登陆火星,但由于缺乏自主在线的GNC技术,需要较大范围的安全区域,这类区域往往并不是最有科学价值的探测点,或者很难找到这样的安全区域。因此,对于未来追求更多科学回报的任务,仅仅满足能够在火星上着陆是不够的,需要GNC发挥更大的作用。[/p][/p][/p]