



























接下去介绍下发射指令传输器
程序见附录三
我运用的是APC220模块(APC220是无线数据传输用的数据写着可以传1km,但是传输速度真的不咋地所以就没用来上箭)在电脑上通过串口传送发送密码到 发射指令传输器
发射指令传输器由arduino UNO, IR transmitter, IR receiver,APC220组成
具体工作流程图如下(我的程序并不是很完美有时会发生点火信号已到达,回传的反馈信号确实错误的情况,这种情况稍微改动下程序就可以避免)
1. 发射指令器电源接通
2. 电脑串口收到信息,输入发射密码
3. 在电脑串口上输入发射密码
4. 发射指令器收到密码,并判断,判断密码正确的话发送红外信号(为了防止丢包多发送几遍)密码判断错误的话发送“错误”到串口监视器
5. 箭载航电收到红外信号,进行编码匹配,如果匹配正确延时10s点火,并在2s后发送一个红外信号到发射指令器。匹配失败发送另一组红外信号到发射指令器。
6. 发射指令器收到传回的红外信号并进行匹配。如果是已发射就向串口发送 在10s后发射的信息,如果是错误的话,就在串口显示错误。
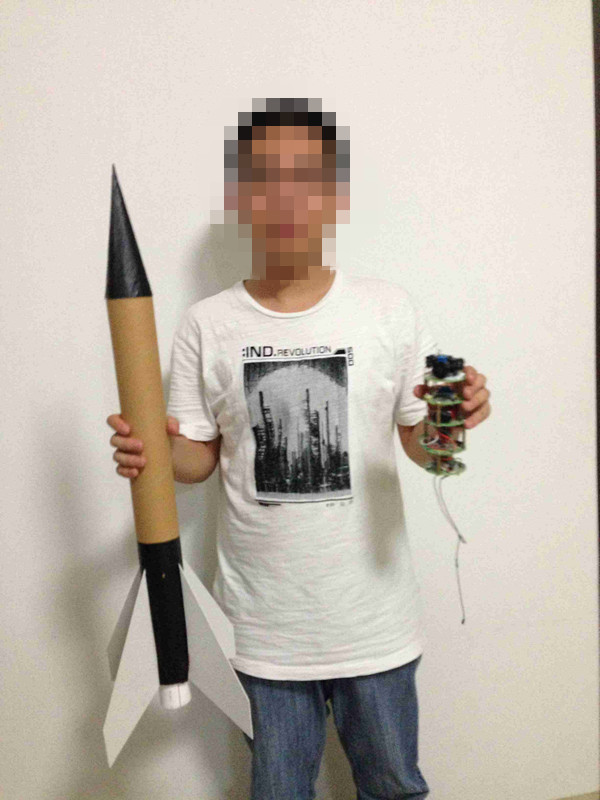
以下是发射指令传输器 和箭载航电 进行点火测试的图片
![33.jpg]()
这是演示这套系统的视频
点击此处查看视频
至此航电系统介绍完毕,此航电系统总共用了5层直径6cm的洞洞板
2. 航拍
使用的是Y3000 迷你DV 这种新型号的已经可以拍得清字了,清晰度相当高。
给个链接清晰度里面有写。如果有广告嫌疑的话我马上把链接删了。
http://item.taobao.com/item.htm?spm=a230r.1.0.0.iUdX9H&id=17516829209&initiative_new=1
这里重点介绍我设计制造的这种抽拉式平台。 航电系统是装在箭体内部的,这就使得要发射时要按航拍摄像机的开关和航电系统的开关,还有降落伞点火头的接线都很麻烦,于是我就设计了这种和抽屉原理类似的部件,需要按开关时可以把整个摄像机和开关和接线柱一块拉出箭体外,处理完后再塞回去。然后盖上箭体上的盖子,这样可以省去很多麻烦事也提高安全系数。
![35.jpg]()
![36.jpg]()
![71.jpg]()
3.3. 箭体
详细尺寸图(单位mm)
![83.jpg]()
头锥外壳由纸做成加502固化,内部由锥形泡沫加强强度。下面接根内径5mm壁厚3mm的纸管加上胶带增厚做头锥套管。
![11.jpg]()
箭体由内经6cm 壁厚3mm的纸管组成。
![45.jpg]()
发动机套管由直径51mm壁厚3mm的纸管做成,并用502强化固定在箭体内
![40.jpg]()
![43.jpg]()
尾翼的设计图,尾翼用502和AB胶固定在箭体上。
B/C=2.3
![65.jpg]()
很直
![46.jpg]()
降落伞虽然没空造。但还是发一下我一直造降落伞的方法
图(多啦A梦第26册) 从小学3年级以来一直是这么造的
![54.jpg]()
顺带看留言终结者时关于降落伞材质的选择上图一张
![QQ20130825-1.jpg]()
程序见附录三
我运用的是APC220模块(APC220是无线数据传输用的数据写着可以传1km,但是传输速度真的不咋地所以就没用来上箭)在电脑上通过串口传送发送密码到 发射指令传输器
发射指令传输器由arduino UNO, IR transmitter, IR receiver,APC220组成
具体工作流程图如下(我的程序并不是很完美有时会发生点火信号已到达,回传的反馈信号确实错误的情况,这种情况稍微改动下程序就可以避免)
1. 发射指令器电源接通
2. 电脑串口收到信息,输入发射密码
3. 在电脑串口上输入发射密码
4. 发射指令器收到密码,并判断,判断密码正确的话发送红外信号(为了防止丢包多发送几遍)密码判断错误的话发送“错误”到串口监视器
5. 箭载航电收到红外信号,进行编码匹配,如果匹配正确延时10s点火,并在2s后发送一个红外信号到发射指令器。匹配失败发送另一组红外信号到发射指令器。
6. 发射指令器收到传回的红外信号并进行匹配。如果是已发射就向串口发送 在10s后发射的信息,如果是错误的话,就在串口显示错误。
以下是发射指令传输器 和箭载航电 进行点火测试的图片

这是演示这套系统的视频
点击此处查看视频
至此航电系统介绍完毕,此航电系统总共用了5层直径6cm的洞洞板
2. 航拍
使用的是Y3000 迷你DV 这种新型号的已经可以拍得清字了,清晰度相当高。
给个链接清晰度里面有写。如果有广告嫌疑的话我马上把链接删了。
http://item.taobao.com/item.htm?spm=a230r.1.0.0.iUdX9H&id=17516829209&initiative_new=1
这里重点介绍我设计制造的这种抽拉式平台。 航电系统是装在箭体内部的,这就使得要发射时要按航拍摄像机的开关和航电系统的开关,还有降落伞点火头的接线都很麻烦,于是我就设计了这种和抽屉原理类似的部件,需要按开关时可以把整个摄像机和开关和接线柱一块拉出箭体外,处理完后再塞回去。然后盖上箭体上的盖子,这样可以省去很多麻烦事也提高安全系数。



3.3. 箭体
详细尺寸图(单位mm)

头锥外壳由纸做成加502固化,内部由锥形泡沫加强强度。下面接根内径5mm壁厚3mm的纸管加上胶带增厚做头锥套管。

箭体由内经6cm 壁厚3mm的纸管组成。

发动机套管由直径51mm壁厚3mm的纸管做成,并用502强化固定在箭体内


尾翼的设计图,尾翼用502和AB胶固定在箭体上。
B/C=2.3

很直

降落伞虽然没空造。但还是发一下我一直造降落伞的方法
图(多啦A梦第26册) 从小学3年级以来一直是这么造的

顺带看留言终结者时关于降落伞材质的选择上图一张

















200字以内,仅用于支线交流,主线讨论请采用回复功能。