每次打开电脑,经常做的第一件事就是打开浏览器然后打开科创的网页,浏览上面的帖子。不过每次最关心的还是科创每天发帖的数量。看到发帖数量挺多时,就会有一种欣喜感;但发帖数量较少时,就有一种担忧感。从高中开始就开始逛科创,学到了很多很多东西,也更加坚定以后要走科研这道路。所以很希望看到科创以前热闹的景象。看到近期科创有点冷清,所以就写了下面这个帖子,是关于怎样制作一个无线的航模遥控器的。
http://bbs.mx3g.com/thread-447222-1-1.html
最初是在上面这个链接看到别人用51单片机和NRF24L01做了一个无线的航模遥控器。从小就希望能拥有一家遥控飞机,但苦于以前没钱。在大一的时候学了一段时间的51单片机,然后在网上找了一些程序,经过改动后终于做出了一个梦寐以求的无线遥控器。
真正开始做这个遥控器是用来参加一个比赛,当时和几名队友设计了一辆能实现无托盘化搬运的类似于叉车的装置(我学的是机械与自动化专业),就是用这个无线遥控器来实现控制的。先附上我们的装置的几张图片。事先用了SolidWorks把三维模型建出来,然后买零件组装,费用是学校出的。

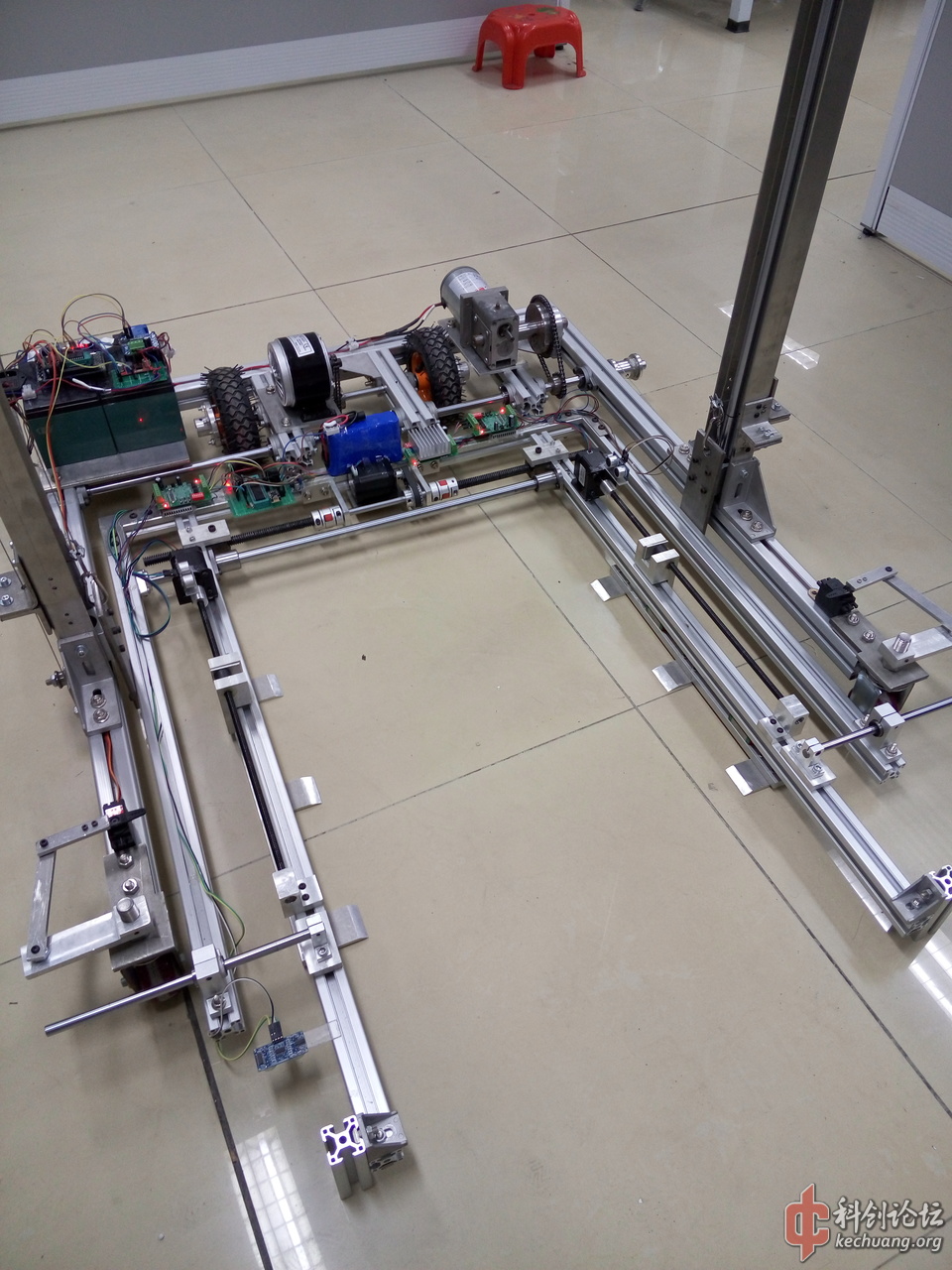
接线有些凌乱。由于是第一次设计作品,所以存在一些问题,但基本能运作起来。
下面是遥控器的图片
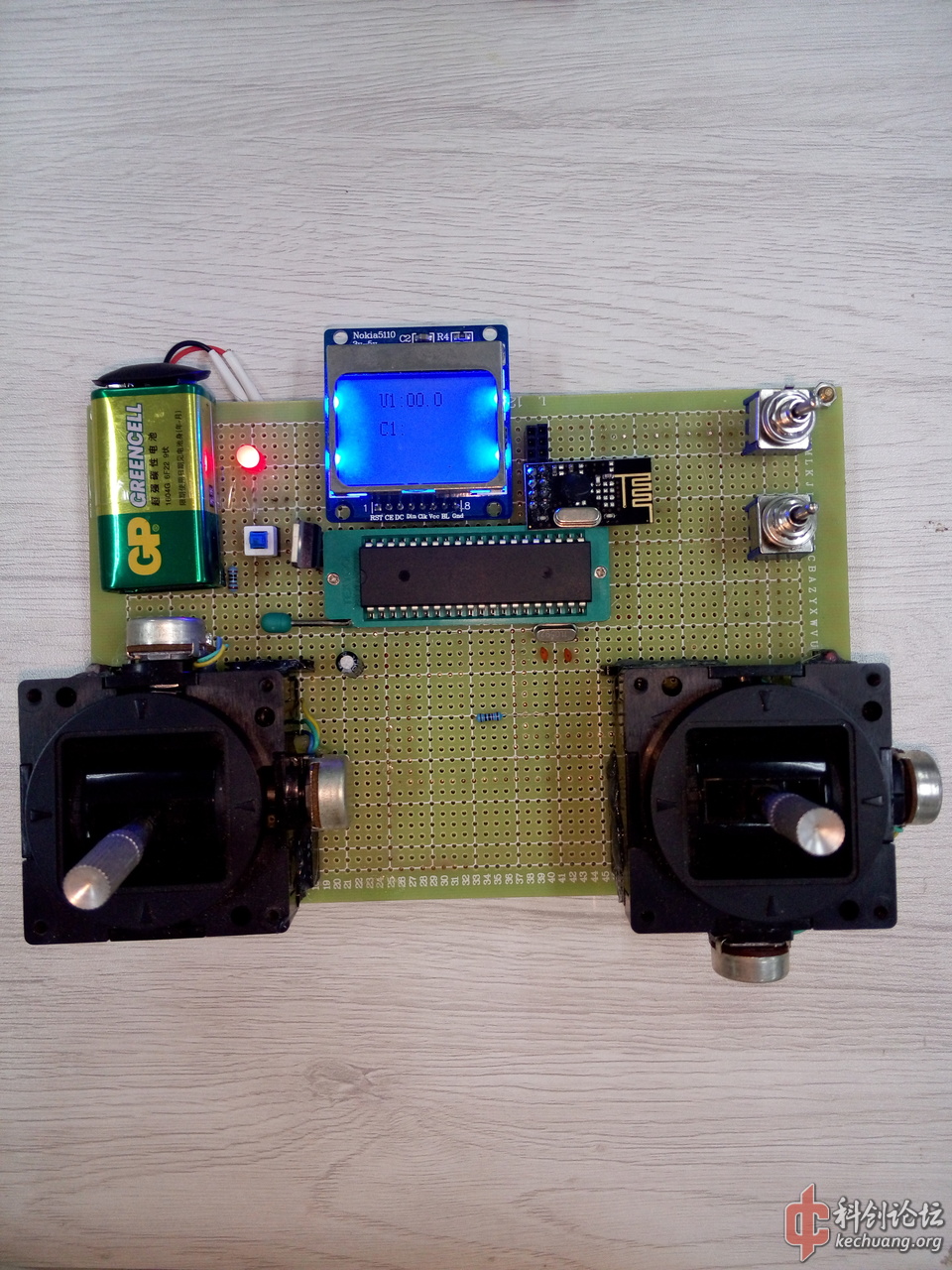
看起来比较简陋,但想要的功能都实现了。
遥控器采用的是STC12C5A60S2单片机,用NRF24L01作为收发模块。在前面那辆车上有两个NRF24L01和两块单片机。通过切换通讯频率实现在不同时间内由一个遥控器控制两个模块。并且车上装了一些超声波传感器等,还用单片机的A/D采集了车上的电压,信息通过NRF24L01传回到遥控器上,在图中蓝色的nokia5110液晶屏上显示出来。利用超声波测距模块和行程开关,可以实现在货物正对着这辆搬运车时,搬运车能自动行驶到货物前并自动搬起货物。这是我用时最久的单片机作品,也是最满意的
比赛完后,终于能有自由的时间,于是改动了程序,做了一个用于遥控船的遥控器,用于平时玩的。在实验室看到有这种遥控船,于是就拿了一只回来改造
![P60426-211530.jpg]()
这种船结构很简单,就两个马达,而且遥控距离很短,只有30米,并且电机的速度不能调大小。于是就把里面的电路全丢掉,自己去焊了电路板,换了L298电机驱动。
![P60530-163356.jpg]()
电路很简单。
然后就兴致勃勃的就拿到湖里区试。结果大失所望,跑的很慢。之前这船配的电池是7.2V的,我换成了12V的,但是这电池太久了,我原本充满电去试,结果跑了一会儿电压立刻降到9点多V,而且这电池很重,另一个原因是L298驱动发热很厉害,可能是电流太大。结果就放在宿舍,没去动过,因为想学其他的东西,所以暂时就把它放在一边。应该换个好的电机驱动和换块轻一点的电池就没问题了。
接下来说一下怎样去做一个遥控器,以上面遥控船的遥控器为例来讲
首先说一下必须要买的东西: 2片STC12C5A60S2单片机,2个NRF24L01模块,一个电机驱动(如果要驱动功率较大的电机,不建议买LN298,最好大功率一些的),两个L7805稳压管,1个AMS1117-3.3稳压芯片,两个摇杆电位器(注意有一个是要不能自动复位的,用于油门,另外一个要自动复位,用于转弯,这里附上淘宝的网址https://s.taobao.com/search?q=%E6%B2%B9%E9%97%A8%E6%91%87%E6%9D%86&js=1&stats_click=search_radio_all%3A1&initiative_id=staobaoz_20160619&ie=utf8)。还有一些电阻电容等,主要是用来构建一个最小单片机系统,使单片机运行起来。液晶屏不是必要的,这里我用的是nokia5110液晶屏,用来显示遥控车的电压和电量,当然电量不会很准确,是用单片机上的A/D转换器采集电池的电压,然后根据电压电量曲线得出电量的。这些东西都可以在淘宝上买得到,而且不贵,一共就几十块。
由于单片机是靠自学的,所以电路设计可能不是很好,也不会用软件很好地画出电路图。为了做好遥控器,减少焊接失误,我先用SolidWorks把遥控器的3D模型做出来,并排线,最后才做出来。第一次就是因为没建三维模型直接焊接,导致焊接失败。突然发现三维模型软件真是个好东西,只要是你想到的具体的东西,都可以建出来,减少失误。遥控器的SolidWorks模型我放在后面,可以下载看看元件是怎样布局的,不过电脑上要安装SolidWorks2014或14以上版本,低版本打不开。
![QQ图片20160619132355.png]()
在SolidWorks上用来草图直线来模拟布线
![QQ图片20160619132921.png]()
下面介绍怎样去焊接
首先是焊接一个单片机最小系统,就是用来使单片机运行的简单电路。
![a686c9177f3e6709e6fbfe5b3bc79f3df9dc559e.jpg]()
需要用到自锁插座、晶振、电阻、电容等。遥控器我用的是9V的电池,在超市能买到,几块钱,只要电压大于5V的电池就行。由于单片机供电要稳定的5V电压,因此需要用L7805稳压管把电压降到5V,然后接到单片机。L7805稳压管怎样接线自己上网去找。在这里说一句的就是,要学会自己去找资料,不要奢望别人把所有的东西都告诉你,要培养自己去找资料的能力,否则你做出来的仅仅是一个没有经过思考就做好的复制品。
接着就是焊接摇杆电位器,摇杆电位器在前面我已经给过网址。我这两个摇杆电位器是从我加入的学校机械团队拿的。其原理和接线也靠你自己上网去找,很简单。单片机通过内部的A/D转换器采集电位器的电压,转换为数字信号。为什么要这样做呢,因为遥控船上电机的速度我是通过单片机的PWM来控制的,通过A/D转换器采集电位器的电压再经过转换经单片机的PWM就能输出占空比不同的电压,电压的占空比不同电机的转速就会不同。两个摇杆电位器上的2个中间接线口(一共有4个,但在这里只用2个,分别用于油门和转弯),分别接在P1^0和P1^1上。
接下来很重要的就是NRF24L01模块的焊接,如果你想要遥控距离比较远就需要买带天线的那种,不过贵一些。它是用来发生和接受信号的,在遥控船和遥控器上各有一块。不过首先要通过AMS1117-3.3芯片降到3.3V才能给NRF24L01模块供电。其引脚图如下
![QQ图片20160619135900.png]()
在程序中设定的引脚如下
![QQ图片20160619140015.png]()
根据上图来把模块接线到单片机上。需要说明的是IRQ要接到前面说的AMS1117-3.3芯片的3.3V引脚。
Nokia5110液晶屏是用来显示遥控船上电池的电量的,方便电池没电时可以及时充电。它和单片机引脚的连接如下
![QQ图片20160619140422.png]()
由于液晶屏接在P0口,需要在P0口接上排阻才行。如果你觉得麻烦的话,可以不要液晶屏。
这样就基本是完成了一个无线的航模遥控器。其实很点单片机就很容易做出来。而且只需要对程序做些改动,就能把它应用到遥控车和遥控船上。由于目前主要学习机械方面,单片机和电子电路不是很在行,这个遥控器还有很多不足,欢迎交流。
单片机还真是个神奇的东西,所以如果各位有时间,也去学学单片机,它能实现以前很多你不敢想的东西。就说到这里,希望各位科技爱好者继续努力,多发发帖,使科创重新活起来。
下面附上程序和遥控器的三维模型(有两个程序,文件夹为‘控制’ 的烧录到遥控器上,文件夹为‘接受’ 的烧录到船上)
 遥控船.rar
137.82KB
RAR
313次下载
遥控船.rar
137.82KB
RAR
313次下载
遥控器.rar
8.70MB
RAR
424次下载









200字以内,仅用于支线交流,主线讨论请采用回复功能。