
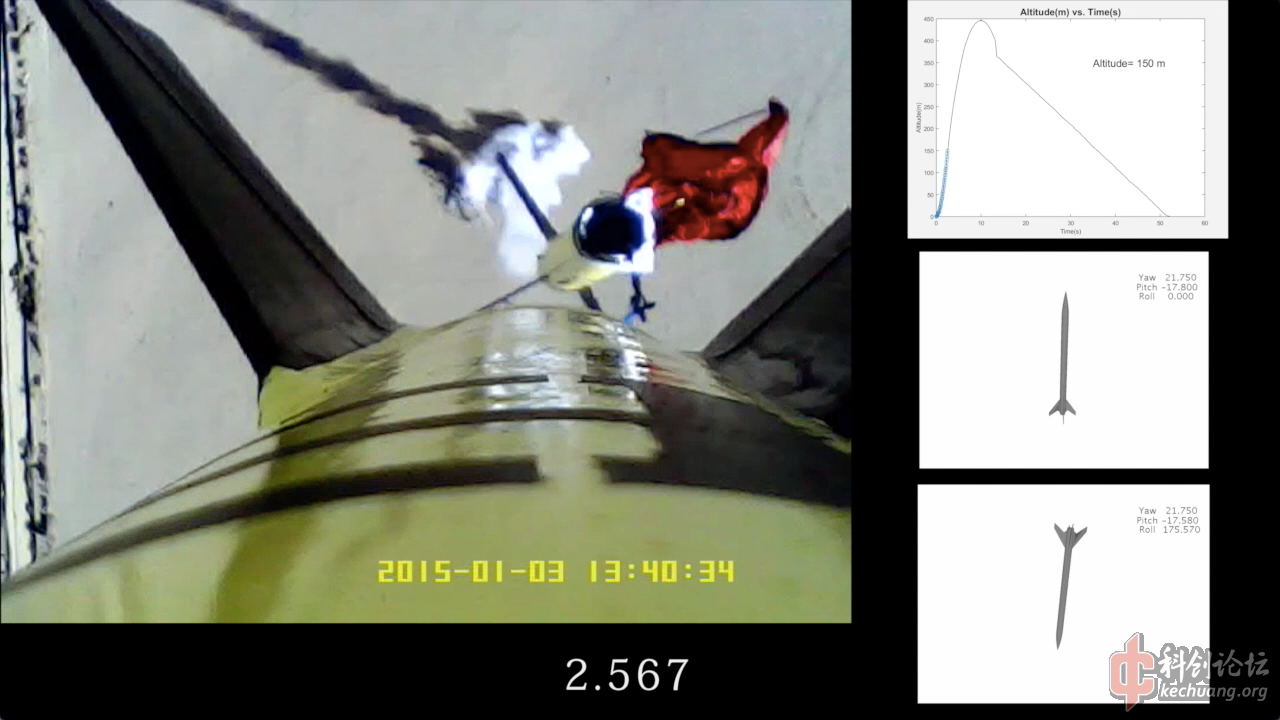
简短的说下发生了什么。。。第一级发动机有轻微漏气导致第一级航电仓气压上升,系统误判过最高点提前开伞。降落伞弹出顺带分离,然后伞绳断了第一级自由落体。第二级由于很复杂也特别巧合的因素判断分离成功。。执行姿态检测。然后IMU抽了看图1的右下角那张。。系统认为姿态异常进入安全回收程序。。第二级没有点火过了最高点后开伞成功回收。
加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...

[修改于 9年6个月前 - 2015/11/12 14:06:20]
引用 火箭casc:我们分离高度设定在118m 实际分离高度大概在124m。 一级里也是金属发动机不回收的话成本很高。 你说的这种方法广泛运用于小型二级火箭,大型二级火箭就没办法用开伞剂直接点火。 第一级也有航电。但是仅仅只是用来开伞。 所有的控制系统都在第二级
一级发动机工作结束,为什么要回收它呢?直接抛掉不可以吗?另外,是否可以用飞行高度来让系统判断开伞时间点?应该也不难做吧。一级烧完能飞多高,计算准确应该差不了多少,老汉认为可靠性应不低于依赖气压判断。唉!干脆烧完了二级发动机直接点火把它蹬掉,...
引用 拔刀斋:用的存储卡,原来是720p 30fps 120度广角镜头的相机,发射前几天那个坏了。 于是临时买了个比较差的 720p 25fps 非广角。(TB经典的车钥匙款mini DV 美帝买8刀一台) 伞绳我记得是直接买的降落伞配的由于不是我负责的我也不太清楚。 对是一级提前分离然后二级点火关掉。我们这枚的目的就是验证安全系统。 分离后有任何异常都不点火直接回收。这次情况很复杂,不过就结果来说这个安全机制运转正常
好清晰的视频,箭载摄像机用无线图传还是存储卡,伞绳用什么材料?
一级提前分离之后二级的点火关掉了?
YT5的伞绳用摩托车橡皮绳,断了之后箭载存储器全部摔了,只有无线数传/图传可用。
无线误码率偏高,猴子拿16进制编辑器修数据修到前几天才修...
引用 20!不曾存在:大概说一下吧,第一级航电用的很简单的连续30组高度小于最高值确认达到最高点开伞。设计时的确是航电仓和发动机仓完全隔离,教授这次用的是新型的发动机,密封上有点问题,隔离的板也被弄出空隙了。 由于第一级航电本来就没采集数据而且也完全摔坏了。。第一级发生的事只能通过残骸推导。 这些数据都是第二级的,第二级的高度数据非常好说明算法没有问题。 姿态异常是第二级判断的。。判断异常后会等到过了最高点再开伞
赞,终于有个大作了,所以收到的数据越多越好,有数据就是成功。
降落伞成功打开了,摄像机拍的也相当清晰,坐等详细报告。
是不是开伞时的点火电流有干扰?姿态异常状态保持2s才开伞,这样就不会被一瞬间的干扰导致错误开伞了吧。航电仓和发动机舱完...
引用 20!不曾存在:第一图中间的那个是我后期处理过的。。我把明显有误的数据删了。最下面的是原始数据 第二图的我忘了。。到开伞前roll一直是0的就是处理过的数据
怎么会有两个不同的姿态数据。
(真是偷 拍设备立功了....)
直接二级航电控制一级是否可行?
别回复楼下那个小白,又来捣乱。
引用 20!不曾存在:我本来设计就是二级和一级有联系的。。。教授说无线传输不靠谱让我搞成独立的或有线连接(我是觉得反正都在火箭上就2m不到无线传输还是很靠谱的)。。。有线连接是可以不过那时我们箭体制造都完成了没办法再改设计加东西。。于是就用两个航电完全独立的。 所有的都靠二级航电,一级只负责检测最高点开伞
怎么会有两个不同的姿态数据。
(真是偷 拍设备立功了....)
直接二级航电控制一级是否可行?
别回复楼下那个小白,又来捣乱。
引用 张静茹:可以的。。。当初第一次造这种没啥经验。。新一代的系统就是两个都用。。气压和姿态双系统。 不过用姿态一定要用测试过的。。。我这枚有装姿态不过一个轴飘飞了。。比气压还惨。。气压只要使用得当还是很准确的。
气压不靠谱呀,姿态加速度不行吗?
引用 张静茹:可以的,要测量的是静态气压,所以火箭箭体上只能开一个洞不能有任何空气流动。只要确保气压计测量的是静态气压就会准。。这个第一级抽风是用的新款的发动机。。然后漏气把隔板搞穿了一个洞。。然后航电仓气压上升。。就抽了。。我们MATLAB理论模拟的第一级烧尽时的高度大概在108米好像,然后实际测试出来的烧尽高度差不多在115m 精确度还是很高的
火箭飞的那么快,舱内的气压能准吗?
200字以内,仅用于支线交流,主线讨论请采用回复功能。