







可以标明一下各个电路板用途名称吗?
55025
%7B%22isLastPage%22%3Afalse%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22t55025%22%2C%22tid%22%3A%2255025%22%2C%22mainForumsId%22%3A%5B%2289%22%5D%2C%22categoriesId%22%3A%5B%220%22%5D%2C%22tcId%22%3A%5B12%5D%7D
%7B%22isEditMode%22%3Afalse%7D
所有教程由网友发布,仅供参考,请谨慎采纳。科创不对教程的科学性、准确性、可靠性负责。
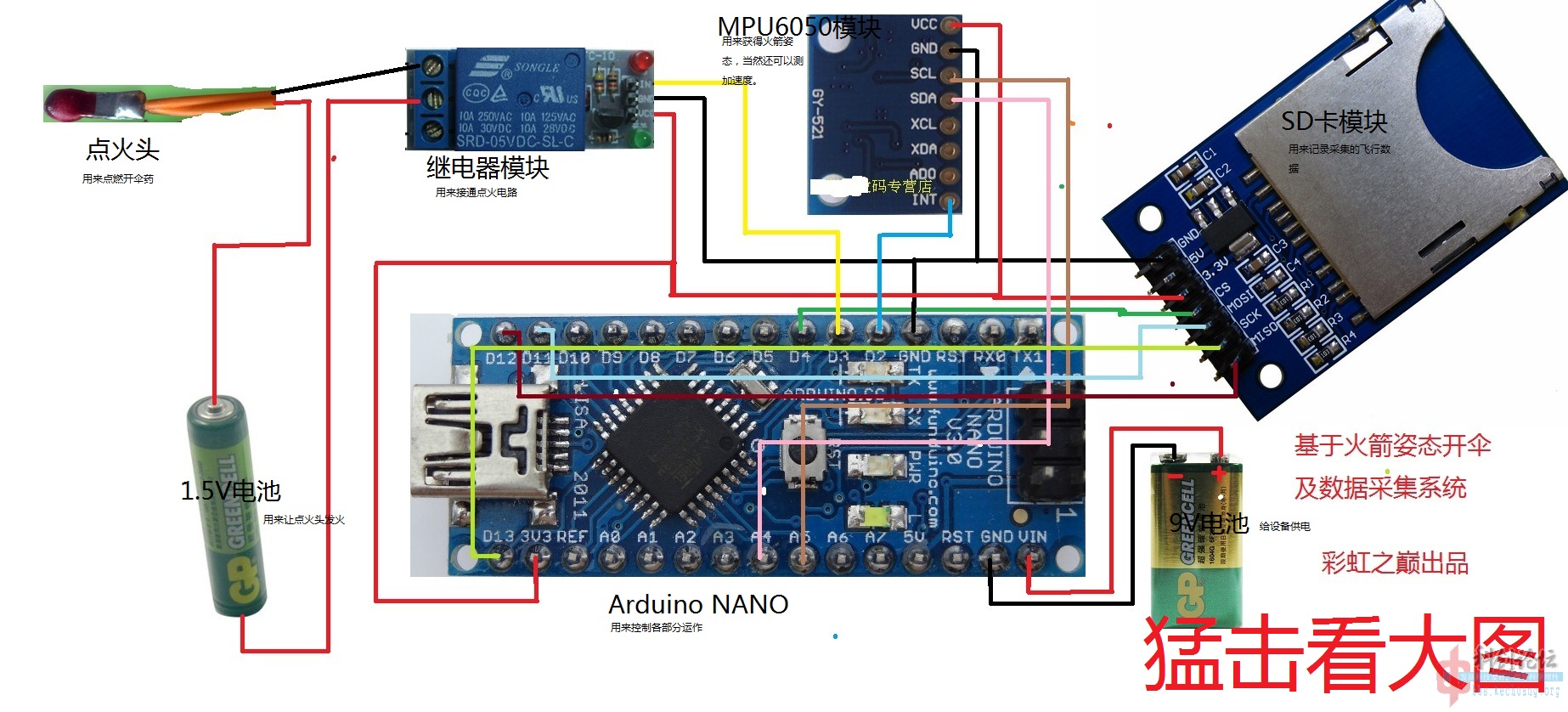
电子开伞系统教程(1、基于箭体姿态开伞与飞行数据的采集系统)
最近火箭版忒冷清,上点货。
自从开始玩火箭,就感觉坛子里小火箭占多数,大火箭和稍有点其它设备在箭上的很少,主要火箭打出去找不回来,即使找回来也摔的不成样,很多东西都成了一次性的消耗品。自己在这方面也深有体会,损失了一些设备。受坛子里一些朋友的启发开始摸索电子开伞系统。从构想到上箭发射,前后两月有余。
程序一个半月前就出来了,只是没有上箭试验,不知是否可行,一直没有贴出来,经过今天上箭试验,证实是可靠的,现将成果与大家分享。
提示:MPU6050_6Axis_MotionApps20.h这个库文件系统不自带,要自己下载放到库文件目录里
呃,文件上传到哪?上传文件类型不匹配,传不了。从这里下载:MPU6050库文件
先上连接图
![NANO3.png]()
再上程序。
这个小程序所实现的功能一开始是基于ADXL345模块和L3G4200D模块结合相应的滤波算法实现,但是系统整体运行速度和过滤杂波的效果及抗震动性能实在不敢恭维。直到发现MPU6050这个神器,直接整合了上述两个模块,还自带DMP,运算速度那真是杠杠的!
/*此版程序作为自己发射火箭测试用,将一些保险验证代码都去掉了,所以一开始定义的一些变量常量没用到,最简单的才是最可靠的。经实际发射,证实此程序识别开伞点可靠。用这个程序请让火箭在发射架上(一定要用发射架,防止火箭在打开电源后发射前倾倒导致意外开伞)就位后再打开系统供电电池电源(9V电池盒自带开关,火箭上掏个小洞对着电池盒上开关,发射前用牙签拨开开关就行),电源打开后由于系统要加载以及要识别SD卡,所以过五秒后再点火。
另外,这个小程序开源,大家想用就用,不反对将此程序用于利润低于30%的商业行为,同时欢迎有兴趣的朋友对这个程序进行改良。另外用此程序发射火箭的朋友请遵守国家的相关法律,本人对用此程序发射火箭所带来的后果不承担任何法律责任。*/
#include "Wire.h"
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#include "SD.h"
#define Vertical_acceleration_judgment_value 15 //设置加速度为多少时判断火箭为已发射的值,本人经验值为15.
#define Launched 1 //用来描述火箭状态为已发射.
#define Not_launched 0 //用来描述火箭状态为尚未发射.
#define Parachute_ignition_switch 3 //用来定义火箭开伞继电器IN1口接在NANO的D3口上
#define Connect HIGH //开伞点火器接通值.
#define Disconnect LOW //开伞点器断开值.
#define Open_the_parachute_inclination -10 //设置箭体与地平线的倾角达到多少度时开伞,可以根据你想要的开伞角度来调整该数值,-10度时火箭刚刚过顶点开始下降约五、六米左右
#define The_correct_flight_angle_limit_of_rocket 30 //设置火箭正常发射的角度极值
unsigned long time;
int16_t ax, ay, az;//三轴加速度
const int chipSelect = 4; //设定SD_CS接口
int OPEN;
int rocket_status; //该变量代表火箭当前的状态,分别为未发射或已发射。
float inclination[3]; //箭体三轴倾角,是一个数组,inclination[0] inclination[1] inclination[2] 分别代表三个轴的倾角
int zz,yy,Current_rocket_inclination; //该变量代表火箭与地平线的倾角.zz和yy是后加上去了,三个轴都采集了,可以再现火箭整个飞行过程中的箭体三维姿态。
int16_t Vertical_acceleration; //火箭垂直加速度,用来判断火箭是否已发射.
int last_rocket_inclination=0; //上一次通过传感器获得的火箭倾角.
//下面为计算三轴角度的一些中间变量
MPU6050 mpu;
uint8_t a1;
uint16_t a2;
uint16_t a3;
uint8_t a4[64];
Quaternion a5;
VectorFloat a6;
//上面为计算三轴角度的一些中间变量
void setup()
{
OPEN=0;
pinMode(Parachute_ignition_switch,OUTPUT); //设置NANO上D3口作为开伞点火开关的输出口.
digitalWrite(Parachute_ignition_switch,Disconnect); //将开伞点火开关初始化为断开.
XXXXXXXgin();
XXXXXXXXXgin(115200);
Init_MPU_6050(); //初始化MPU6050.
rocket_status=Not_launched; //将火箭状态初始化为未发射.
XXXXXgin(chipSelect);
}
void loop()
{
zz=Get_Current_Rocket_Inclination(0);
yy=Get_Current_Rocket_Inclination(2);
Current_rocket_inclination=Filter_Current_Rocket_Inclination(1);//取得火箭当前的倾角,参数这里取值为1,代表X轴.
Vertical_acceleration=XXXXXXtAccelerationX()/2048;//还是因为传感器安装位置的关系,火箭垂直轴为X轴。这里表示的是当前火箭的垂直加速度,程序里用作判断火箭是否已经发射。其实就是表示X轴的当前加速度
File dataFile = SD.open("data.txt",FILE_WRITE);
if (dataFile)
{
XXXXXXXXXXXint(int(Current_rocket_inclination),DEC); //将箭体倾角数据写入文件
XXXXXXXXXXXint(",");
XXXXXXXXXXXint(int(yy),DEC);
XXXXXXXXXXXint(",");
XXXXXXXXXXXint(int(zz),DEC); //箭体姿态的另外两个轴数据写入文件
XXXXXXXXXXXint(",");
XXXXXXXXXXXintln(Vertical_acceleration,DEC); //将火箭垂直加速度写入文件
XXXXXXXXXXXose();
}
if(Current_rocket_inclination<Open_the_parachute_inclination)//判断箭体倾角是否达到程序开头所设置的开伞倾角,如果达到开伞倾角,则进入下面的倾角再判断。
{
Current_rocket_inclination=Filter_Current_Rocket_Inclination(1); //再通过传感器获得一次倾角数据。
if(Current_rocket_inclination<Open_the_parachute_inclination)//通过第二次获得的倾角数据来重复上面的判断,防止他妈的传感器发抽风病输出有问题的数据导致误开伞,这里基本能把所有的噪波都过滤了。如果达到开伞倾角,则进入下面最后一步的判断。
{
Current_rocket_inclination=Filter_Current_Rocket_Inclination(1);
if(Current_rocket_inclination<Open_the_parachute_inclination)//第三次对当前的倾角进行判断,经过三次在不同时间点上对火箭倾角取值应该可以把所有的错误数据都过滤了,下面可以开伞了
{
digitalWrite(Parachute_ignition_switch,Connect);//接通开伞点火开关。
if(OPEN==0)
{
File dataFile = SD.open("data.txt",FILE_WRITE);
if (dataFile)
{
XXXXXXXXXXXintln("Opened"); //在数据文件中写入开伞的标记点
XXXXXXXXXXXose();
}
OPEN=1;
}
}
}
}
}
int Filter_Current_Rocket_Inclination(int b)
{
int temp;
temp=Get_Current_Rocket_Inclination(b);
if(temp==0)
{
return last_rocket_inclination;
}
else
{
last_rocket_inclination=temp;
return last_rocket_inclination;
}
}
/*上面的函数是过滤传感器传回的无效值,参数b可以为0,1,2,分别代表传感器的Z,X,Y三个轴,本程序中取X轴,如果用其它轴来判断,则部分程序需要相应的修改*/
float Get_Current_Rocket_Inclination(int c)
{
float rocket_inclination=0;
a1=XXXXXXtIntStatus();
a3=XXXXXXtFIFOCount();
if (a1&0x02)
{
while (a3<a2) a3=XXXXXXtFIFOCount();
XXXXXXtFIFOBytes(a4, a2);
a3-=a2;
XXXXXXsetFIFO();
XXXXXXpGetQuaternion(&a5, a4);
XXXXXXpGetGravity(&a6, &a5);
XXXXXXpGetYawPitchRoll(inclination, &a5, &a6);
rocket_inclination=inclination[c]*180/M_PI;
return rocket_inclination;
}
}
/*上面的函数是通过传感器来获得当前X轴与地平线的倾角数据,由于不可知的原因,获得的数据可能有噪点,不能拿来直接使用,需要进行适当的过滤.参数c可以为0,1,2,分别代表传感器的Z,X,Y三个轴,本程序中取X轴,如果用其它轴来判断,则部分程序需要相应的修改*/
void Init_MPU_6050()
{
XXXXXXitialize();
XXXXXXtFullScaleGyroRange(3);
XXXXXXtFullScaleAccelRange(3);
XXXXXXtDLPFMode(6);
XXXXXXtDHPFMode(1);
XXXXXXpInitialize();
XXXXXXtDMPEnabled(true);
a2 = XXXXXXpGetFIFOPacketSize();
}
/*上面的函数是对MPU6050进行初始化和一些必要的设置*/
重点注意:
一、由于程序是以X轴作为箭体,所以请注意MPU6050的安装方向,如图所示,安装时做到两点就行,1、模块上的小芯片面向自己;2、小芯片上的圆点在左。
![mpu.jpg]()
二、由于电磁继电器的固有缺点,安装时请将继电器倒置,可以避免在高过载情况发生误动作。有电子知识基础的朋友可以换成固态继电器,MOS管之类的。(反正我不懂这个[s:274] ,还望懂的朋友画个图科普一下。 )
三、为可靠发火,请不要用一块电池同时作为设备和点火头的电源。
四、为了提高数据采集的频率,请尽量用高速SD卡。
五、设备做好后,自己多测试几次,做到心里有数。
自从开始玩火箭,就感觉坛子里小火箭占多数,大火箭和稍有点其它设备在箭上的很少,主要火箭打出去找不回来,即使找回来也摔的不成样,很多东西都成了一次性的消耗品。自己在这方面也深有体会,损失了一些设备。受坛子里一些朋友的启发开始摸索电子开伞系统。从构想到上箭发射,前后两月有余。
程序一个半月前就出来了,只是没有上箭试验,不知是否可行,一直没有贴出来,经过今天上箭试验,证实是可靠的,现将成果与大家分享。
提示:MPU6050_6Axis_MotionApps20.h这个库文件系统不自带,要自己下载放到库文件目录里
呃,文件上传到哪?上传文件类型不匹配,传不了。从这里下载:MPU6050库文件
先上连接图
再上程序。
这个小程序所实现的功能一开始是基于ADXL345模块和L3G4200D模块结合相应的滤波算法实现,但是系统整体运行速度和过滤杂波的效果及抗震动性能实在不敢恭维。直到发现MPU6050这个神器,直接整合了上述两个模块,还自带DMP,运算速度那真是杠杠的!
/*此版程序作为自己发射火箭测试用,将一些保险验证代码都去掉了,所以一开始定义的一些变量常量没用到,最简单的才是最可靠的。经实际发射,证实此程序识别开伞点可靠。用这个程序请让火箭在发射架上(一定要用发射架,防止火箭在打开电源后发射前倾倒导致意外开伞)就位后再打开系统供电电池电源(9V电池盒自带开关,火箭上掏个小洞对着电池盒上开关,发射前用牙签拨开开关就行),电源打开后由于系统要加载以及要识别SD卡,所以过五秒后再点火。
另外,这个小程序开源,大家想用就用,不反对将此程序用于利润低于30%的商业行为,同时欢迎有兴趣的朋友对这个程序进行改良。另外用此程序发射火箭的朋友请遵守国家的相关法律,本人对用此程序发射火箭所带来的后果不承担任何法律责任。*/
#include "Wire.h"
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#include "SD.h"
#define Vertical_acceleration_judgment_value 15 //设置加速度为多少时判断火箭为已发射的值,本人经验值为15.
#define Launched 1 //用来描述火箭状态为已发射.
#define Not_launched 0 //用来描述火箭状态为尚未发射.
#define Parachute_ignition_switch 3 //用来定义火箭开伞继电器IN1口接在NANO的D3口上
#define Connect HIGH //开伞点火器接通值.
#define Disconnect LOW //开伞点器断开值.
#define Open_the_parachute_inclination -10 //设置箭体与地平线的倾角达到多少度时开伞,可以根据你想要的开伞角度来调整该数值,-10度时火箭刚刚过顶点开始下降约五、六米左右
#define The_correct_flight_angle_limit_of_rocket 30 //设置火箭正常发射的角度极值
unsigned long time;
int16_t ax, ay, az;//三轴加速度
const int chipSelect = 4; //设定SD_CS接口
int OPEN;
int rocket_status; //该变量代表火箭当前的状态,分别为未发射或已发射。
float inclination[3]; //箭体三轴倾角,是一个数组,inclination[0] inclination[1] inclination[2] 分别代表三个轴的倾角
int zz,yy,Current_rocket_inclination; //该变量代表火箭与地平线的倾角.zz和yy是后加上去了,三个轴都采集了,可以再现火箭整个飞行过程中的箭体三维姿态。
int16_t Vertical_acceleration; //火箭垂直加速度,用来判断火箭是否已发射.
int last_rocket_inclination=0; //上一次通过传感器获得的火箭倾角.
//下面为计算三轴角度的一些中间变量
MPU6050 mpu;
uint8_t a1;
uint16_t a2;
uint16_t a3;
uint8_t a4[64];
Quaternion a5;
VectorFloat a6;
//上面为计算三轴角度的一些中间变量
void setup()
{
OPEN=0;
pinMode(Parachute_ignition_switch,OUTPUT); //设置NANO上D3口作为开伞点火开关的输出口.
digitalWrite(Parachute_ignition_switch,Disconnect); //将开伞点火开关初始化为断开.
XXXXXXXgin();
XXXXXXXXXgin(115200);
Init_MPU_6050(); //初始化MPU6050.
rocket_status=Not_launched; //将火箭状态初始化为未发射.
XXXXXgin(chipSelect);
}
void loop()
{
zz=Get_Current_Rocket_Inclination(0);
yy=Get_Current_Rocket_Inclination(2);
Current_rocket_inclination=Filter_Current_Rocket_Inclination(1);//取得火箭当前的倾角,参数这里取值为1,代表X轴.
Vertical_acceleration=XXXXXXtAccelerationX()/2048;//还是因为传感器安装位置的关系,火箭垂直轴为X轴。这里表示的是当前火箭的垂直加速度,程序里用作判断火箭是否已经发射。其实就是表示X轴的当前加速度
File dataFile = SD.open("data.txt",FILE_WRITE);
if (dataFile)
{
XXXXXXXXXXXint(int(Current_rocket_inclination),DEC); //将箭体倾角数据写入文件
XXXXXXXXXXXint(",");
XXXXXXXXXXXint(int(yy),DEC);
XXXXXXXXXXXint(",");
XXXXXXXXXXXint(int(zz),DEC); //箭体姿态的另外两个轴数据写入文件
XXXXXXXXXXXint(",");
XXXXXXXXXXXintln(Vertical_acceleration,DEC); //将火箭垂直加速度写入文件
XXXXXXXXXXXose();
}
if(Current_rocket_inclination<Open_the_parachute_inclination)//判断箭体倾角是否达到程序开头所设置的开伞倾角,如果达到开伞倾角,则进入下面的倾角再判断。
{
Current_rocket_inclination=Filter_Current_Rocket_Inclination(1); //再通过传感器获得一次倾角数据。
if(Current_rocket_inclination<Open_the_parachute_inclination)//通过第二次获得的倾角数据来重复上面的判断,防止他妈的传感器发抽风病输出有问题的数据导致误开伞,这里基本能把所有的噪波都过滤了。如果达到开伞倾角,则进入下面最后一步的判断。
{
Current_rocket_inclination=Filter_Current_Rocket_Inclination(1);
if(Current_rocket_inclination<Open_the_parachute_inclination)//第三次对当前的倾角进行判断,经过三次在不同时间点上对火箭倾角取值应该可以把所有的错误数据都过滤了,下面可以开伞了
{
digitalWrite(Parachute_ignition_switch,Connect);//接通开伞点火开关。
if(OPEN==0)
{
File dataFile = SD.open("data.txt",FILE_WRITE);
if (dataFile)
{
XXXXXXXXXXXintln("Opened"); //在数据文件中写入开伞的标记点
XXXXXXXXXXXose();
}
OPEN=1;
}
}
}
}
}
int Filter_Current_Rocket_Inclination(int b)
{
int temp;
temp=Get_Current_Rocket_Inclination(b);
if(temp==0)
{
return last_rocket_inclination;
}
else
{
last_rocket_inclination=temp;
return last_rocket_inclination;
}
}
/*上面的函数是过滤传感器传回的无效值,参数b可以为0,1,2,分别代表传感器的Z,X,Y三个轴,本程序中取X轴,如果用其它轴来判断,则部分程序需要相应的修改*/
float Get_Current_Rocket_Inclination(int c)
{
float rocket_inclination=0;
a1=XXXXXXtIntStatus();
a3=XXXXXXtFIFOCount();
if (a1&0x02)
{
while (a3<a2) a3=XXXXXXtFIFOCount();
XXXXXXtFIFOBytes(a4, a2);
a3-=a2;
XXXXXXsetFIFO();
XXXXXXpGetQuaternion(&a5, a4);
XXXXXXpGetGravity(&a6, &a5);
XXXXXXpGetYawPitchRoll(inclination, &a5, &a6);
rocket_inclination=inclination[c]*180/M_PI;
return rocket_inclination;
}
}
/*上面的函数是通过传感器来获得当前X轴与地平线的倾角数据,由于不可知的原因,获得的数据可能有噪点,不能拿来直接使用,需要进行适当的过滤.参数c可以为0,1,2,分别代表传感器的Z,X,Y三个轴,本程序中取X轴,如果用其它轴来判断,则部分程序需要相应的修改*/
void Init_MPU_6050()
{
XXXXXXitialize();
XXXXXXtFullScaleGyroRange(3);
XXXXXXtFullScaleAccelRange(3);
XXXXXXtDLPFMode(6);
XXXXXXtDHPFMode(1);
XXXXXXpInitialize();
XXXXXXtDMPEnabled(true);
a2 = XXXXXXpGetFIFOPacketSize();
}
/*上面的函数是对MPU6050进行初始化和一些必要的设置*/
重点注意:
一、由于程序是以X轴作为箭体,所以请注意MPU6050的安装方向,如图所示,安装时做到两点就行,1、模块上的小芯片面向自己;2、小芯片上的圆点在左。

二、由于电磁继电器的固有缺点,安装时请将继电器倒置,可以避免在高过载情况发生误动作。有电子知识基础的朋友可以换成固态继电器,MOS管之类的。(反正我不懂这个[s:274] ,还望懂的朋友画个图科普一下。 )
三、为可靠发火,请不要用一块电池同时作为设备和点火头的电源。
四、为了提高数据采集的频率,请尽量用高速SD卡。
五、设备做好后,自己多测试几次,做到心里有数。
[修改于 7年11个月前 - 2017/01/15 23:59:04]
非常详细的教程,很有参考价值,验证了使用三轴加速度计开伞的可行性。
为了保证安全可靠,保险措施可以进一步改进。
为了保证安全可靠,保险措施可以进一步改进。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

回 2楼(拔刀斋) 的帖子
这是使用三轴陀螺仪。。。
引用
1
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

彩虹,大赞!真羡慕你的踏实劲儿,一步一步的都有成果,羡慕!
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 4楼(justkaka) 的帖子
惯性导航 必须解决飞行姿态控制的问题
现在无论是调整翼面还是调整喷口都还不成熟
相信未来会有进展的
羡慕彩虹啊,有姿态采集,就一定会有未来的基于采集数据进行的操控
现在无论是调整翼面还是调整喷口都还不成熟
相信未来会有进展的
羡慕彩虹啊,有姿态采集,就一定会有未来的基于采集数据进行的操控
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 3楼(warmonkey) 的帖子
算倾角只用了ax ay az 没有陀螺速率积分
引用
2
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 8楼(拔刀斋) 的帖子
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

回 7楼(justkaka) 的帖子
对惯导这块还没涉足,不过我想吧,至少要让火箭知道几点:1、自己当前位置;2、目标当前位置;3、自己当前姿态;4、自己当前的指向
如果基于arduino系统来设计的话,火箭当前位置可以用箭载GPS来获取;固定目标位置可以事先写入程序;火箭当前姿态可以用MPU6050来获取;火箭当前的指向可以用HMC5883L电子罗盘来获取。
如果基于arduino系统来设计的话,火箭当前位置可以用箭载GPS来获取;固定目标位置可以事先写入程序;火箭当前姿态可以用MPU6050来获取;火箭当前的指向可以用HMC5883L电子罗盘来获取。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。


引用第11楼div于2013-03-01 22:04发表的 :
楼主 厉害 想你学习!
顺便问下 上位机软件是什么
这个应用就木有用到上位机
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

简单的画了下mos开关的驱动原理,输出低电平信号导通。
![89_28260_ca832ac6389e395.png]()

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

引用第13楼yuyue3106于2013-03-02 22:52发表的 :
简单的画了下mos开关的驱动原理,输出低电平信号导通。![89_28260_ca832ac6389e395.png]()
三极管的箭头画错地方了吧
引用
1
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

回 13楼(yuyue3106) 的帖子
3205用大了吧 IRF7832就够用了
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 楼主(彩虹之巅) 的帖子
我觉得像arduino这类的产品最好别在这类应用上使用 atmega8 也不贵 GCC直接开发就可以 没必要套个壳 略显臃肿了
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 16楼(mixsall) 的帖子
感觉arduino比较简单,上手容易,容易普及,不是专业人员也可以二次开发,估计成本要比atmega8高一点。atmega8这个真心不懂,楼上能说说两者的优缺点吗?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

回 17楼(彩虹之巅) 的帖子
直接用GCC开发出来的东西比arduino小了很多.只要你会C基本就行了.毕竟火箭对实时性还是有点要求的.
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
不知道你说的这个相关的配套传感器及资源多不多,如果不多,什么都要自己写的话也就失去了普及的意义。毕竟大部分玩火箭的不想把太多心思花在这上面。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 19楼(彩虹之巅) 的帖子
估计想有现成的库是不大可能的,不过可以参考的代码还是挺多的.毕竟总线协议就那么几种,多搞搞就觉得大同小异了.传感器之类的东西的选择的灵活性还更大了.
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 20楼(.........) 的帖子
听你这么说,有时间的话找点资料看看,一般需要学哪些东西?能推荐一下吗?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 21楼(彩虹之巅) 的帖子
首先要搭建一个编译环境,如果喜欢用IDE Eclipse+WINAVR不错,网上有详细的构建方法.
然后需要一本C语言参考书啊,各种芯片的DataSheet,还有AVRGCC的参考书,个人推荐AVR单片机的GCC程序设计,虽然有点老.
然后就可以写写程序了,个人推荐从写LCD1602开始,然后可以写ADXL345啊L3G4200D啊24L01等等.
主要要搞清楚接口协议类型,然后各个寄存器的意义,然后初始化的过程,这些DS上写的都很清楚.
然后需要一本C语言参考书啊,各种芯片的DataSheet,还有AVRGCC的参考书,个人推荐AVR单片机的GCC程序设计,虽然有点老.
然后就可以写写程序了,个人推荐从写LCD1602开始,然后可以写ADXL345啊L3G4200D啊24L01等等.
主要要搞清楚接口协议类型,然后各个寄存器的意义,然后初始化的过程,这些DS上写的都很清楚.
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 22楼(.........) 的帖子
放弃arduino平台等于把问题复杂化了。
对于小火箭来说,运算速度不是主要问题。用硬件成本换人工成本更合适。
直接上个STM32 ART之类的板子,速度就够用了。
要继续深入下去,需要研究惯性导航和自动控制原理。
对于小火箭来说,运算速度不是主要问题。用硬件成本换人工成本更合适。
直接上个STM32 ART之类的板子,速度就够用了。
要继续深入下去,需要研究惯性导航和自动控制原理。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 23楼(warmonkey) 的帖子
也就是说,要深入下去,放弃arduino平台是必然的.
至于具体用说明MCU,这个取决于个人习惯啊.
当然也看过arduino平台跑kalman滤波做自平衡小车的.
希望可以统一航电硬件,创造出比arduino平台更适合火箭的平台
至于具体用说明MCU,这个取决于个人习惯啊.
当然也看过arduino平台跑kalman滤波做自平衡小车的.
希望可以统一航电硬件,创造出比arduino平台更适合火箭的平台
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

[s:230]高质量发帖!
彩虹大神,最近的贴都好厉害,加油!
彩虹大神,最近的贴都好厉害,加油!
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
小火箭上的航电用什么平台这个问题,感觉没有适合不适合,只有喜好不喜好。就好象有人喜欢杜蕾丝,有人喜欢冈本一样。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

回 26楼(彩虹之巅) 的帖子
请问彩虹
1.用什么软件写入arduino nano 3.0的,在没接传感器的情况下,我用arduino1.0写入,但是不行.
2.您能否保证示意图接线正确.
3.另外,我的sd卡模块有八排针,没有CS只有MISO&SCK.
XXXXu6050的下载地址失效了,这个库文件是放在SD卡的根目录里吗?
1.用什么软件写入arduino nano 3.0的,在没接传感器的情况下,我用arduino1.0写入,但是不行.
2.您能否保证示意图接线正确.
3.另外,我的sd卡模块有八排针,没有CS只有MISO&SCK.
XXXXu6050的下载地址失效了,这个库文件是放在SD卡的根目录里吗?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
1--- 用的是arduino IDE 1.03版本 下载地址:XXXXXXXXXXXXXXXXXXXXX/en/Main/Software
2---接线应该没问题,有问题再交流,我记得自己就是这样接的。
3---你把SD模块插针有字的那面拍照发来看看。
4---MPU6050的库文件下载地址有效,右键另存为就行了,放在Library目录下面的MPU6050目录里。地址:XXXXXXXXXXXXXXXXXX/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
2---接线应该没问题,有问题再交流,我记得自己就是这样接的。
3---你把SD模块插针有字的那面拍照发来看看。
4---MPU6050的库文件下载地址有效,右键另存为就行了,放在Library目录下面的MPU6050目录里。地址:XXXXXXXXXXXXXXXXXX/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。


SDCS就是CS口
这两天正搞利用气压计开伞,比那个MPU6050简单。经过试验,找最高点也比较容易。这两天发贴讨论。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 23楼(warmonkey) 的帖子
兼顾开发效率和运行效率用Maple比较合适?类似四轴可以用Ardudrone也可以用Flymaple。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
问彩虹 ,一楼的图片上没有看到气压传感器的连接呢?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 32楼(div) 的帖子
为了让系统最简化,没把气压模块画上去。
过几天准备再写个气压开伞的程序,到时候再画上去。
最终将整合成两者互为备份的开伞系统。到时候程序也一并贴出来。
过几天准备再写个气压开伞的程序,到时候再画上去。
最终将整合成两者互为备份的开伞系统。到时候程序也一并贴出来。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
谢谢彩虹之巅
姿态+气压 两套互为备份 准确开伞 学习了!
姿态+气压 两套互为备份 准确开伞 学习了!
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
为何不行
我导入了mpu6050.h这个文件,可是代码写不进nano
怎么办
![捕获6050.jpg]()
我导入了mpu6050.h这个文件,可是代码写不进nano
怎么办

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

回 36楼(hq951224) 的帖子

晕,你这库文件下的.........把网页代码都下载了。。。。过滤掉库文件里的网页代码。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 36楼(hq951224) 的帖子
先看看你的MPU6050_6Axis_MotionApps20的代码开头是不是这样的 如下图
![MPU6050.png]()
先看看你的MPU6050_6Axis_MotionApps20的代码开头是不是这样的 如下图

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
然后再将上图显示中的六个库文件放在你建立的文件夹中我的是Rocket_MPU6050 这样在编译看看 我的是通过了!希望你能顺利通过
看图
![文件.png]()
看图

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 39楼(div) 的帖子


放到库文件目录里就可以了。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
试了上面的方法 更简单 谢谢 !
但我发现我的库里没有你的文件多 加上新建的MPU6050才14个文件
但我发现我的库里没有你的文件多 加上新建的MPU6050才14个文件
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 41楼(div) 的帖子
其它的几个是以前买的其它传感器给的库文件,都用不着了。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
如何验证设备可以正常上箭开伞
以蓝点为重心向绿色箭头方向上倾斜30度时,继电器的绿灯熄灭,但其他方向均不熄灭
![Screenshot_2013-03-17-10-46-35.png]()
![IMG_20130317_003918_mh000.jpg]()
以蓝点为重心向绿色箭头方向上倾斜30度时,继电器的绿灯熄灭,但其他方向均不熄灭


引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 43楼(hq951224) 的帖子
应该是MPU6050的安装方向有问题,可以把MPU6050来个特写吗?把芯片露出来,标上方向。
另外实际上箭时插针可能会松脱,最好用焊锡,也可以用热熔胶把插针固定好。
另外实际上箭时插针可能会松脱,最好用焊锡,也可以用热熔胶把插针固定好。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 44楼(彩虹之巅) 的帖子
这张是最清楚的了,竖直安装,应该没错。
按下复位继电器响一下绿灯亮起,然后向某一固定方向倾斜一下(43楼的图)继电器响一下,绿灯熄灭。有时不知什么原因绿灯怎么样就是不灭
我觉得是你只设计了一个方向的倾角,其他的角度忘记了,或者说是bug?
视频是向一侧倾斜时,继电器指示的的情况
点击此处查看视频
![1363521640660.jpg]()
按下复位继电器响一下绿灯亮起,然后向某一固定方向倾斜一下(43楼的图)继电器响一下,绿灯熄灭。有时不知什么原因绿灯怎么样就是不灭
我觉得是你只设计了一个方向的倾角,其他的角度忘记了,或者说是bug?
视频是向一侧倾斜时,继电器指示的的情况
点击此处查看视频

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 45楼(hq951224) 的帖子
任何角度的倾角都可以用。不存在固定角度的问题,这个已经测试过了。
你那个方向装错了。我帖子最后特别提出了几个重点。
看图:
请注意MPU6050模块中那个芯片方向
![T1.jpg]()
你那个方向装错了。我帖子最后特别提出了几个重点。
看图:
请注意MPU6050模块中那个芯片方向

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

自己顶定,每天都在关注这个帖子更新,但是好久没更新了。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。


有了这个详细的教程,我相信我以后不会摔火箭了…
引用
加载评论中,请稍候...

200字以内,仅用于支线交流,主线讨论请采用回复功能。