尝试计算一下电机运行情况 有刷电机太复杂 不考虑火花放电和线圈切换 假设其模型是R+L+U串行 U是某转速下反电动势是不变量 V是供电电压
$\dot I=(V-U-IR)/L$
I应该是$a+be^{ct}$形式
$ \dot I=bce^{ct}=(V-U-R(a+be^{ct}))/L$
所以 V-U-Ra=0 -> a=(V-U)/R
----路上又发现 从这里开始推导有问题 少了个L 只能再来!!! 不好意思 下面是更正过的---
且 -Rb/L=bc -> c=-R/L
设边界条件 $I_{t=0}=I_0$ 则$a+b=I_0 -> b=I_0-(V-U)/R$
令$I_m=(V-U)/R$是PWM导通时候最大电流 而PWM关断时忽略续流二极管压降 $I_m=-U/R$
最终 $I=I_m+(I_0-I_m)e^{-R/L*t} $
当PWM关断时 由式子可知电流会负 但是续流的是二极管 这不可能 最多到电流为0 这时候不再有电流给电机提供力矩 有个断流时间
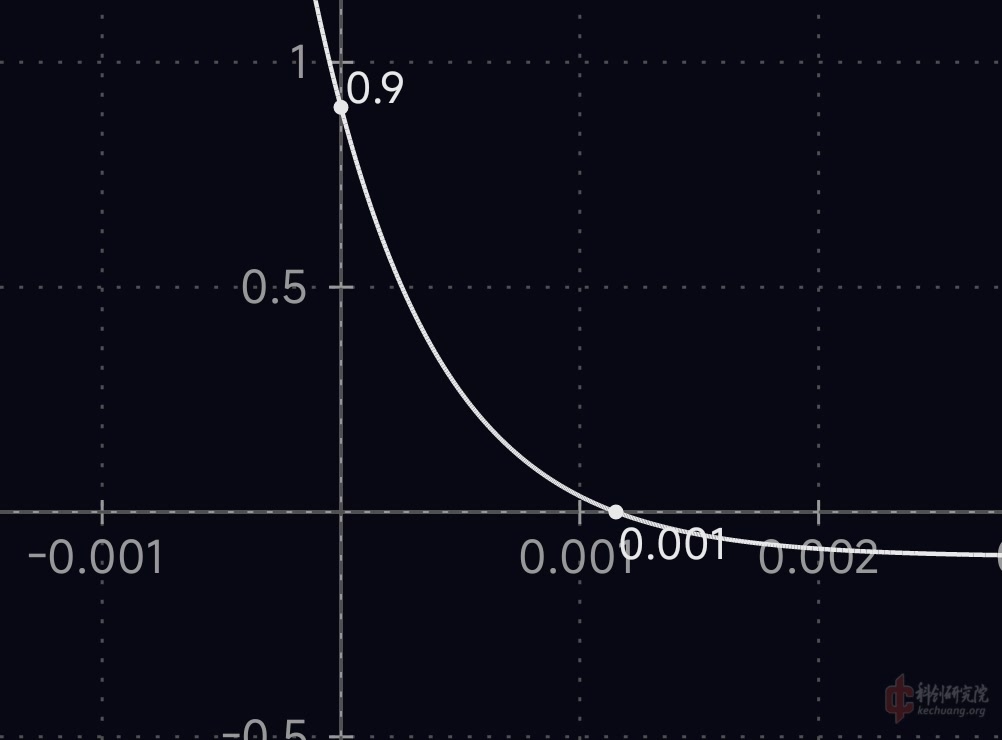
我测过电机 L=6mH R=12Ohm 供电12伏 电机号称空载3200RPM 实际观测 在上蠕动管带空气时候 远小于这个转速 只有1/10左右 估计U=1.2伏 假设从电流$I_0=(V-U)/R=0.9A$开始下降 且$I_m=-U/R=-0.1A$ 画出$I=-0.1+e^{-2000t}$图像 可见0.001秒后 续流结束
![Screenshot_2024-04-09-21-55-26-342_us.mathlab.android.calc.free-edit.jpg]()
如果更低转速下 比如最大负载转速的1/10 U=0.12伏 $I=-0.01+e^{-2000t}$ 电流持续时间更长了
![Screenshot_2024-04-09-21-59-05-874_us.mathlab.android.calc.free-edit.jpg]()
干脆连PWM导通图像(电流从0开始)$I=0.9-0.9e^{-2000t}$也画了 可见差不多也0.002秒就接近最终电流了
![Screenshot_2024-04-09-22-00-53-515_us.mathlab.android.calc.free-edit.jpg]()
如果PWM周期小于0.001秒 这时候线圈续流蓄能是起作用的 我唯一担心的是 当电刷切换线圈时候 旧线圈的能量不仅在铁心中储存 还有不少通过火花放电的形式释放掉 哎 先忽略掉吧
由电流在PWM导通关断时候连续 互为起始条件
$I_{0off}=(V-U)/R+(I_{0on}-(V-U)/R)e^{-R/L*t_{on}} $
$I_{0on}=-U/R+(I_{0off}+U/R)e^{-R/L*t_{off}} $
得$I_{0off}=(V-U)/R+(-U/R+(I_{0off}+U/R)e^{-R/L*t_{off}} -(V-U)/R)e^{-R/L*t_{on}} $
$I_{0off}(1-e^{-R/L*T})=(V-U)/R+U/R*e^{-R/L*T}-V/R*e^{-R/L*t_{on}} $
$I_{0off}R(1-e^{-R/L*T})=U*(e^{-R/L*T}-1)+V*(1-e^{-R/L*t_{on}})$
$U=V*(1-e^{-R/L*t_{on}})/(1-e^{-R/L*T})-I_{0off}R$
反电动势应该于转速正比 一般情况 也假设电流与转速正比(假设负载力矩和转速正比)再设全导通时候转速为 $\omega_m$
于是 转速 $\omega=\omega_m*(1-e^{-R/L*t_{on}})/(1-e^{-R/L*T})$
这当然是非线性的 有趣的是 推到最后 居然只与R有关(但愿我路上推导没出错) " src="/default/XXXXXXXXXXXXXg">
" src="/default/XXXXXXXXXXXXXg">
联系实际画图 我发现 线性度在一般情况下其实蛮高的 而且PWM频率越高 电机线圈电阻越小 电感越大 线性度越高 下面是1kHz和5kHz下 转速和导通比例的关系
![Screenshot_2024-04-09-22-08-19-811_us.mathlab.android.calc.free-edit.jpg]()
![Screenshot_2024-04-09-22-10-38-622_us.mathlab.android.calc.free-edit.jpg]()
之比例所以做以上推导 是想确定个PWM频率 因为MCU直驱AO3400 频率不可能太高 否则驱动不到位会让AO3400过热
而且网上有经验说 PWM频率太高 转速反而上不去 我这里理想模型没有出现这种情况 但我想实际情况难说 想办法评估到一个较好用又不太高的频率好了
现在看来 可能频率最好在1kHz以上 毛估一下 AO3400栅极充电需要7nC 5mA充电需要1.4us 放电当它一样 总需要3us
按最大电流1A 供电12伏 1kHz时候 0.3%耗损率 约36mW 3kHz接近0.1w 对它封装是可以接受的值 就试试3kHz吧
--------4.19-------
刚测试了PWM频率和转速
![rpm-pwm.png]()
果然当频率够高 PWM占空比和转速的关系 就越发线性了
但是频率越高 启动越难 网上说的"PWM频率太高 转速反而上不去" 在低速时是有道理的 考虑到频率高时候 近乎是恒电流驱动 力矩也恒定 如果不先克服摩擦力 就转不起来 我之前的分析简化了 只考虑速度的阻力 没有考虑摩擦力 尤其是蠕动泵本身的摩擦力就大
说实在的 100Hz 和 1kHz 有可以听闻 令人不快的音频声 而10kHz没有声音 10Hz的声音与蠕动泵本身声音混杂不易听闻 最后的算法我还在考虑中
现在最恼火的还是Micropython 就这样几天 我已经提过一次bug 两次feature要求了 ... 用起来有很多细节与之前认为的不一样 比如在esp32不支持硬中断 奇怪的GC报告 感觉项目中充满了无可奈何的补丁 不情愿使用的显然不理想不通用的实现方法 很令人不爽






























200字以内,仅用于支线交流,主线讨论请采用回复功能。