

加油
87623
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22902834%22%2C%22tid%22%3A%2287623%22%2C%22mainForumsId%22%3A%5B%22165%22%5D%2C%22categoriesId%22%3A%5B%5D%2C%22tcId%22%3A%5B6%5D%7D
%7B%22isEditMode%22%3Afalse%7D
自制火箭飞控(仅控制舵机)
关键词
arduino飞控火箭自制矢量
飞控
简介:惯性测量单元是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。
一 · 舵机
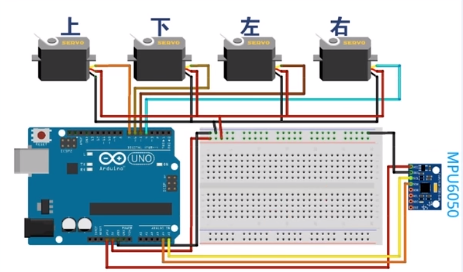
利用MP6050(姿态传感器)输出欧拉角(XYZ三轴转动角度)给到arduino开发板,开发板将角度数据转变为能使舵机转到相应角度的PWM波给到舵机。舵机再控制发动机的喷口方向,使其推力方向发生改变,让火箭以最大限度为垂直飞行(以此增加飞行高度)。该矢量控制系统可以实现全向摆动,推测最大推力偏向角为30度。偏流环偏转时扰动燃气,引起气流偏转,实现对推力的偏向。该结构位于发动机喷管外侧,极大降低了对密封性的要求。在设计上,作动力臂向后弯曲,保证推杆量正交,使得X、Y轴的控制互相独立,互不干扰。(添加飞控的火箭必须内径大于40mm)。
配备无线数传模块和SD卡模块,实现箭上数据发送和储存。 另附一张电路图。


这是成品视频
202204011846.mp4 点击下载
自制了一个很废的火箭飞控_哔哩哔哩_bilibili XXXXXXXXXXXXXXXXXXXXXXXX/video/BV1x34y1s7Vx?spm_id_from=333.999.0.0
200字以内,仅用于支线交流,主线讨论请采用回复功能。