

这种轮毂电机性价比确实挺高的,6.5寸直径的在某宝上40~50一个,去年暑假买了两个。买回来一看,里面自带霍尔元件,没啥用过的痕迹,估计是厂家破产之后的回本吧。
加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
为了给DIY机器人寻找一种相对廉价的无刷电机驱动方案,笔者在Github上偶遇了这个有趣的项目。一群国外爱好者对中国国产玩具级电动平衡车(Hoverboard)进行了全方位的逆向工程,不仅复原出了完整的控制主板电路图,还编写了可用的开源固件,开源固件提供了非常灵活的接口支持,可通过PPM,UART或ADC等方法通过控制主板对原车的6.5寸无刷轮毂电机进行速度控制。由于这种玩具平衡车在欧美的熊孩子中非常流行,几乎人手一个,曾经非常容易捡到,因此在DIY爱(la)好(ji)者(lao)中广受欢迎,被誉为 “扭矩/价格 比" (torque-to-price ratio)最高的驱动方案,经常用于替换价格较高的ODrive和VESC方案。




原项目在Github的链接:
https://github.com/lucysrausch/hoverboard-firmware-hack
进阶版FOC驱动项目(推荐):
https://github.com/EFeru/hoverboard-firmware-hack-FOC
这些控制主板一般使用STM32或GD32,经过众人的不懈努力现在已经支持多种品牌的电动平衡车主板,最常见的一种主板布局如下所示:
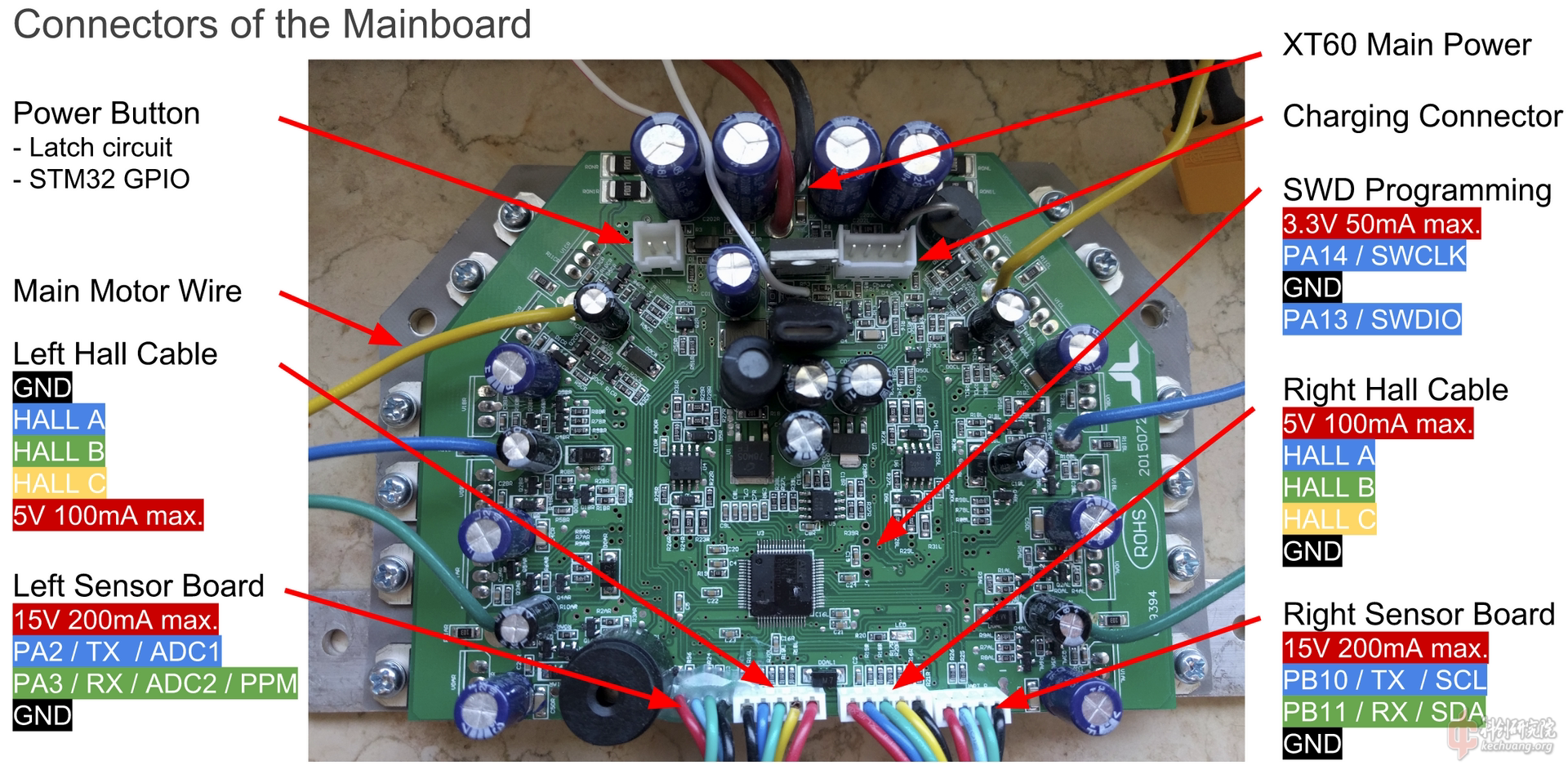
控制主板上保留了主控芯片的调试接口,可以用ST-Link进行烧写,而原本用来与平衡车传感器连接的若干接口则可用来作为与主控程序通讯的I/O口。整块主板一般使用36~42V的锂电供电,自带5V和3.3V DCDC。烧写过程请严格依照文档中所给的步骤,否则有烧掉主板的风险。
基于这个驱动板和电机方案,广大爱好者们各显神通,做出了各式各样的业余或专业作品。
ROS机器人:

俄国初创企业Yandex搭建的外卖机器人实验平台:
https://habr.com/ru/company/yandex/blog/590997/


甚至还不乏学院派用户:
如MIT开发的AGRO机器人平台(该项目未使用原厂主控,而是使用了ODrive):
https://dgonzrobotics.com/agro/

也有专业机器人底盘公司试图以此电机为基础,使用VESC作为无刷电机驱动,开发相对廉价的通用轮式机器人底盘,但貌似现在的状态是“Delayed indefinitely due to supply chain issues”:
https://roverrobotics.com/products/rover-mini

结尾:
由于需求量甚广,电子垃圾也逃不过残酷的市场规律,如今在eBay奸商那里一张拆机控制主板已炒至40美刀,拆机电机更是涨到了30~50美刀(也有部分是由于供应链问题),而一辆全新的电动平衡车在淘宝上不过5、600人民币。


[修改于 3年5个月前 - 2022/01/11 15:05:06]
这种轮毂电机性价比确实挺高的,6.5寸直径的在某宝上40~50一个,去年暑假买了两个。买回来一看,里面自带霍尔元件,没啥用过的痕迹,估计是厂家破产之后的回本吧。



200字以内,仅用于支线交流,主线讨论请采用回复功能。