


数据波形图什么的都很全,算是严谨
加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
由于第一次做TC,再加上水平有限,难免踩坑。发出来给广大网友参考。本文分为设计部分、问题总结和测试效果三个部分。在设计上主要参考了大佬rb-sama的几篇帖子:
谈一谈QCW泰斯拉线圈(tesla coil)的BUCK控制部分
设计部分:
完整原理图见附件
1、DR控制部分
驱动使用UCC21520隔离驱动IC,数据手册标称响应时间19ns,驱动频率可达5M(实际没测过系统最高能跑多少频率)。另外UCC21222价格低点,我用UCC21520是手头刚好有。驱动IC自带disable引脚,为后续的“主动续流模式”设计提供了便利。
原理图中J10、J11外接谐振槽路,U4的disable引脚接过流保护信号(DR_OCP),而U10的disable引脚接地(不使用这个脚)。这样在谐振槽路触发过流时,Q8Q9被禁用,而Q10Q11继续工作,利用Q8Q9的体二极管实现主动续流模式。

G极驱动中的Z17和C29提供-5V驱动电压,驱动供电是18V,这样驱动幅值就是+13V/-5V。

IGBT管子选择FGH50T65SQD。数据手册给出在测试条件Ic大于IRG4PC50UD的情况下,Qg还比50UD小。可见开关速度优于50UD。


2、跳脉冲的实现

U7和U15是光纤接收头DLR1150。U7用于灭弧信号接收。看到rb-sama在跳脉冲驱动的帖子中提到通过改变限流大小实现无前级QCW的想法,于是预留了U15用于接收QCW调制信号,在J7处选择是TL431基准源还是QCW信号作为过流保护基准。U13-A用于锁存过流保护信号,U13-B保证在电流过零时执行过流保护信号,并在槽路电流下降到阈值以下时恢复,实现跳脉冲驱动。不过正如rb-sama所说,74系列芯片是单边沿触发,关断时间是一个完整的谐振周期。但和双边沿触发的效果差别大不大?这个还没做过对比试验。
3、buck部分
现在回头看buck的设计,感觉设计得有点复杂。最开始看了Steve ward的buck方案,觉得他的电路没有过流保护,可靠性不高。还是想应用成熟的buck电路。在这种上kW的应用中首选CCM工作模式。但是选择电压模式还是电流模式?当时认为电流模式需要斜坡补偿,而斜坡补偿会导致在小占空比时过流保护点过大,特别是电感小的情况下。另外当时选择UC3843作为控制IC,它的主流斜坡补偿方案是从定时电容上获取斜坡信号,但当电感小的情况下,定时电容提供的斜坡斜率就不够用了。所以选择了电压模式,而电压模式做逐周限流就会加剧电路复杂程度。后续会优化这一部分。

另外可以看到使用了带同步整流的buck方案,并且给同步整流管Q2做了逐周限流。U3-B做过流比较,U8-A做过流信号锁存,U5-B提供时钟信号在新的周期恢复过流保护。

同步整流的作用是工作在QCW模式时,在一个锯齿波结束后使母线电压快速恢复到设置的低压值。防止在下一个锯齿波周期开始时母线电压处于比较高的水平。
由于不知道电弧负载多大,而参考其它帖子也只给了平均功率,并没有灭弧周期和ontime数据。(rb-sama倒是给了one-shot模式下的电弧能量,但他的数据不能直接应用到我这个小型TC上)。最终以不损坏管子为目标,设置逐周限流点为30A。另外不想自己绕电感,手头最合适的成品电感就是CS467060铁硅铝磁环绕50T,静态感量350u。占空比0.5时电感纹波电流最大,这时输出电流能达到17.5A(开关频率40k),而感量下降到170u。200V输出时功率达到3.5kW(后面调试发现这个功率远远不够

buck输出功率不够,临时改了buck电感和调整逐周限流点到50A,但输出功率还是不够。具体所需功率在测试效果部分讲。
4、系统供电部分
供电全部使用220V转18V电源模块(其中一块改输出电压到12V),淘宝上几块钱一个,非常的香。(香归香,坑还是有的,问题总结部分再说)

5、灭弧控制部分
灭弧控制就很简单了,使用单片机输出高频载波信号350k给光纤发射头,接收端RC滤波,通过调制发射端占空比来控制接收端滤波后的电压值。

6、线圈参数
外径110mmPVC水管,0.2mm线径绕230mm高,顶部贴圆形铜箔增大对地等效电容。谐振频率230kHz。初级电容是电磁炉谐振电容8个串联,总容量37.5nF。初级线圈用0.1*150股膜包线在外径130mmPVC水管绕6T。实测拍频80k,计算得耦合系数k=0.327

问题总结:
问题1:光纤发送三角波调制的高频载波信号,在接收端滤波之后,三角波的上升沿出现凹坑(波形忘存了)。使用非隔离探头测试光纤接收头的输出信号时,问题消失。当时考虑要不以后就挂个探头使用 怀疑是探头电容的影响,翻数据手册找到这样一句话:

在接收头的输出信号脚对地并30p电容,问题解决。很多时候器件没有按照预想的方式去工作,数据手册里都有对应关键信息,可以多在数据手册里找线索(或者应用文档)。
问题2:在发送三角波调制信号时,接收头在上升沿和下降沿的输出波形异常(如下图)。异常处发射端波形没问题。规格书标称最大频率可以到16M,按50%占空比算脉宽也有62.5ns,发射端的最小脉宽远没达到器件极限。


CH1=发射头波形(某些地方幅值小是示波器显示问题,展开后波形是正常的)
CH2=接收头经过一阶RC滤波的波形(C25波形)
后来查东芝TORX178的规格书发现发射占空比要求在25%~75%之间,怀疑DLR1150也有类似要求。把发射占空比设置为10%~90%,问题消失。具体原因还不清楚,但也没有细究下去。
问题3:反激电源模块起机上升沿过慢导致系统上电存在隐患。

CH2=反激模块空载输出
CH3=Q8管子驱动电压
从CH2可以看出反激模块的输出像是有缓启,上升沿分两个斜率。这样它给驱动供电时先达到UCC21520的启动阈值8.7V,Q8有驱动电压输出,并且开始建立负压(C29开始充电)。由于反激模块输出上升沿过慢,C29的充电电压抵消了一部分驱动电压,导致驱动幅值减小,就像CH3的波形那样,最小驱动电压掉到7V,几乎和米勒平台一致,这是不可接受的。解决方法是增加欠压保护电路,如下图


CH3=Q8管子驱动电压
优化后起机时管子最小驱动电压11V。
问题4:下电时,如果18V电源(驱动供电)掉电速度比12V电源(逻辑器件供电)快,并且18V电源掉电时谐振电流没有衰减到0,可能导致管子硬开关损坏。解决方法是增加18V电源的电容到470u。下电时由于buck最先停止工作,并且buck输出电容容量小,12V的保持时间很容易超过buck输出电压掉电时间,这样掉电时序就基本没什么问题了。
结合问题3/4,当系统原理图大致设计完成后一定要检查上下电时序,可以缩短后期调试时间。
测试效果:
跳脉冲限流50A,峰值电压设置200V,ontime=7ms,上升沿占比=90%,总周期=100ms


CH2=谐振电流(采样电阻端电压)
CH3=母线电压
如果剑弧形成原理是ontime时间内缓慢增加输入能量,导致电弧能量不足以打开分叉,从而沿原来方向生长。那么为什么在ontime一开始就达到了限流点,却仍然有剑弧效果?
我想到的可能原因是在初级能量往次级传输的过程中,由于拍频现象,初级电流峰值减小,这时母线电压的能量可以往次级传输,这样母线电压越大,往次级传输的能量越多。所以如果用PLL把开关频率固定在一个谐振峰,这时没有拍频现象,还会有剑弧效果吗?
跳脉冲限流50A,母线电压由直流源供电200V,QCW光纤信号接到跳脉冲限流设置点(U15),ontime=7ms,上升沿占比=90%,总周期=100ms


CH2=谐振电流(采样电阻端电压)
CH3=母线电压
直接调制谐振电流波形效果很差。电流包络波几乎看不出锯齿波,可能是ontime刚开始时,次级电弧长度小,能量消耗小,次级能量耦合回初级导致电流峰值升高到超过限流点,再加上拍频现象使得包络波不像锯齿波。由于限流点是锯齿波,和母线锯齿波方案相比,相同的ontime下电弧能量更小。
跳脉冲限流50A,母线电压由直流源供电200V,QCW光纤信号接到跳脉冲限流设置点(U15),ontime=20ms,上升沿占比=90%,总周期=100ms


CH2=谐振电流(采样电阻端电压)
CH3=母线电压
即使增大ontime效果也不如母线电压调制方案。基本宣判调制限流点方案凉凉。
跳脉冲限流50A,母线设置250V,ontime=0.5ms,总周期=2.5ms,输入400V2A。ontime时间内功耗4kW

跳脉冲限流75A,设置200V峰值,ontime=7ms,上升沿占比90%,周期100ms。输入锯齿波电压波形没看,但根据后续的测试结果估计幅度没达到设定值。

跳脉冲限流75A,母线设置200V实际150V,ontime=1.4ms,周期14ms。输入电压是稳的,母线电压会掉到150V左右。buck功率还是不够大。


CH1=母线电压
CH3=输入电压
由CH1可以看出灭弧后,有比较大幅度的过冲,这主要是buck输出电容量小,再加上环路带宽不高导致的。解决方法除了增大容量外,还可以增加过压比较关PWM的控制电路,但在TC系统中,这不是主要问题,所以没有优化它。
把直流源直接接到buck输出端。
母线电容改为2068u,输入300VDC,电容充满电后断开直流源,ontime=3ms,oneshot母线电压下降38V(跳脉冲限流75A),也就是ontime时间内平均输出电流26.19A

跳脉冲限流75A,母线电容2068u,输入300VDC,ontime=6ms

ontime增大之后电弧长度几乎没变。除了母线电压下降的原因,我想可能还和单个拍频包络波内初级电容最大储能没有随ontime的增加而增加有关。
最后,弧次比也没超过2,还有很多参数之间的制约关系还要花时间学习研究一下。
平均每个月只有4天时间来做这个TC,做了5个多月,后续计划还会再优化一轮,但可能会鸽很久

[修改于 2年9个月前 - 2022/07/17 23:54:11]
不错 很强,QCW里面 SKP和BUCK结合可以增加系统的稳定性
可以注意一点,剑弧的生成,其实是在补偿电弧长度不断增加的能量
最近和国外一些爱好者讨论交流这个问题,其实也就是说,普通DRSSTC靠notch和弧容匹配
从槽路瞬间抽取能量,类似激光“调Q”的一个过程,这个触发的方法,是依靠积蓄在PRI TANK的能量。
当电弧增长达一定程度,实现完全匹配,此时产生一个迅速上升的功率,单点电弧产生多条突破、
而剑弧则相反,必须保证功率供给的稳定,而且上升的速度必须严格匹配电弧的增长速度。
根据一些爱好者实验的经验,QCW的输出其实基本上是恒压的,电流的增加维持了电弧的功率增长。
所以你可以试试把SKP的值和保护阈值缩小一点,环路速度再增加一些,尽量做到逐周期限流。
-
关于QCW的BUCK部分,看到你用ASIC芯片做了反馈环,这个是很好的创新。
但是不可否认的是,Gaoguangyan的乒-乓比较器方案,能够在几十KW瞬态输出的基础上,
产生接近20KHZ的穿越频率的高性能,(见下图bode),这样的高频带响应,也可以为输出提供非常优质的跟随。
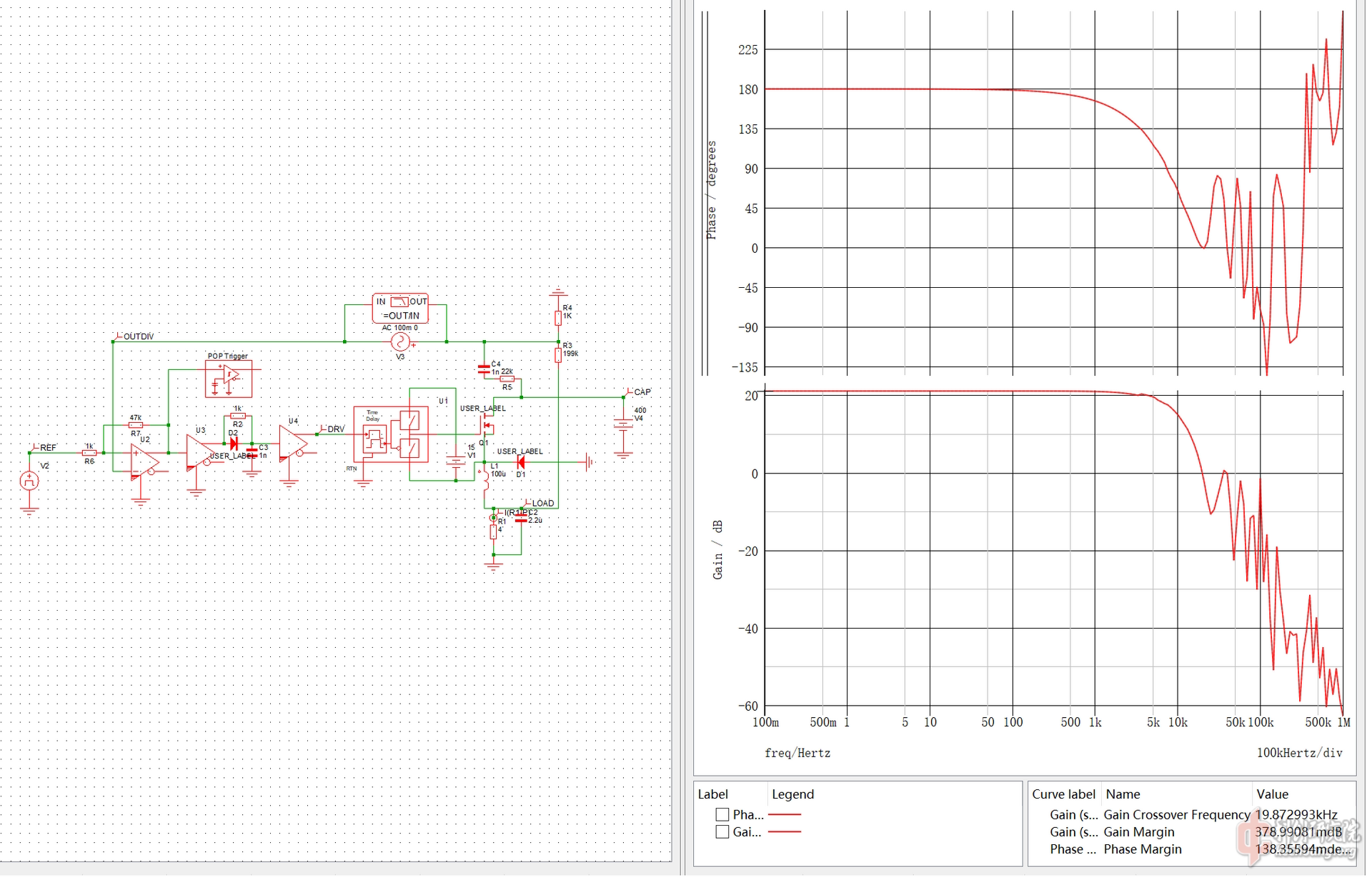
这样的特性可以进一步的让由单片机或模拟信号产生的斜坡稳定跟随输出到VBUS上,会有助于剑弧的稳定增长。
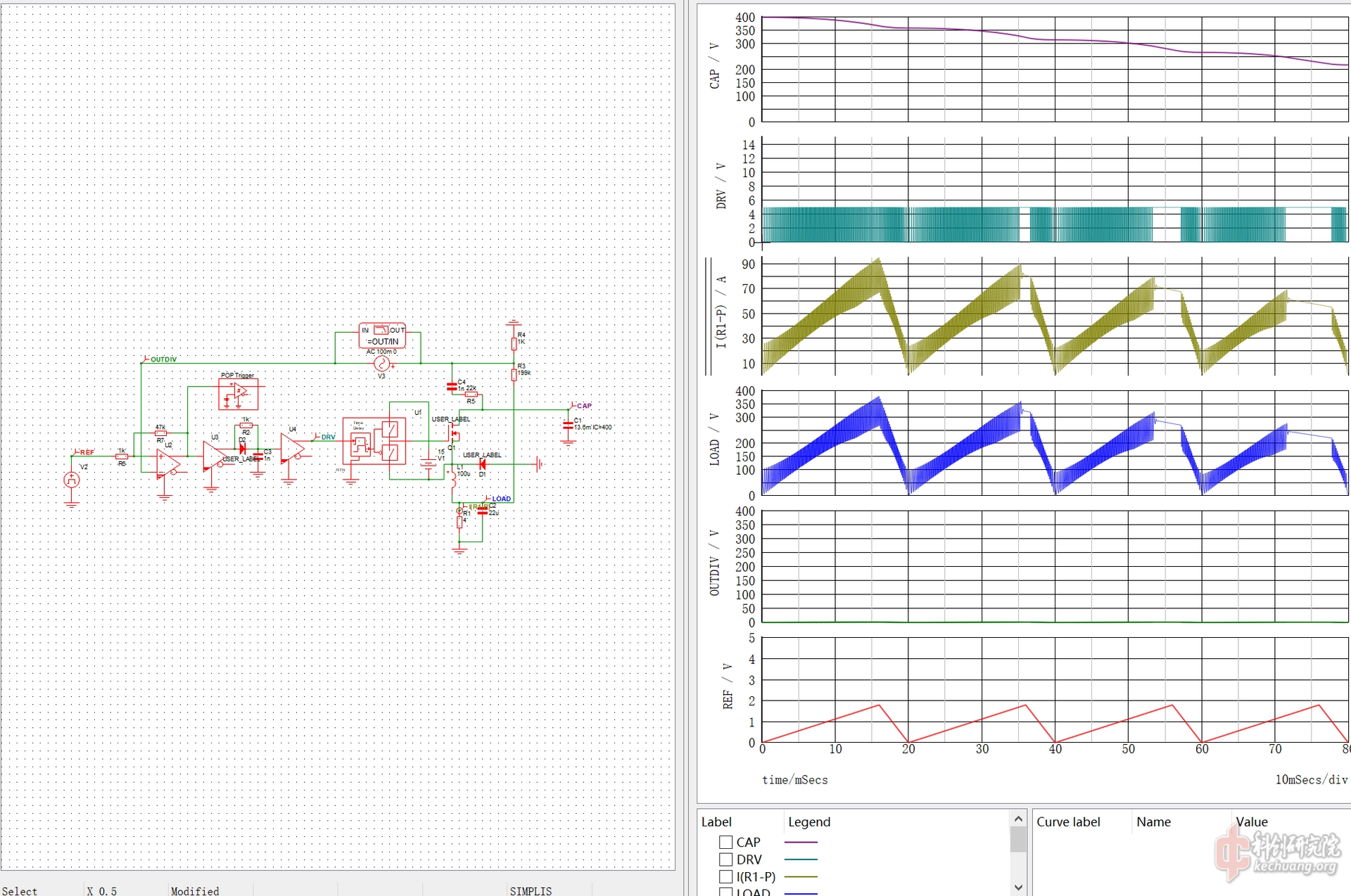
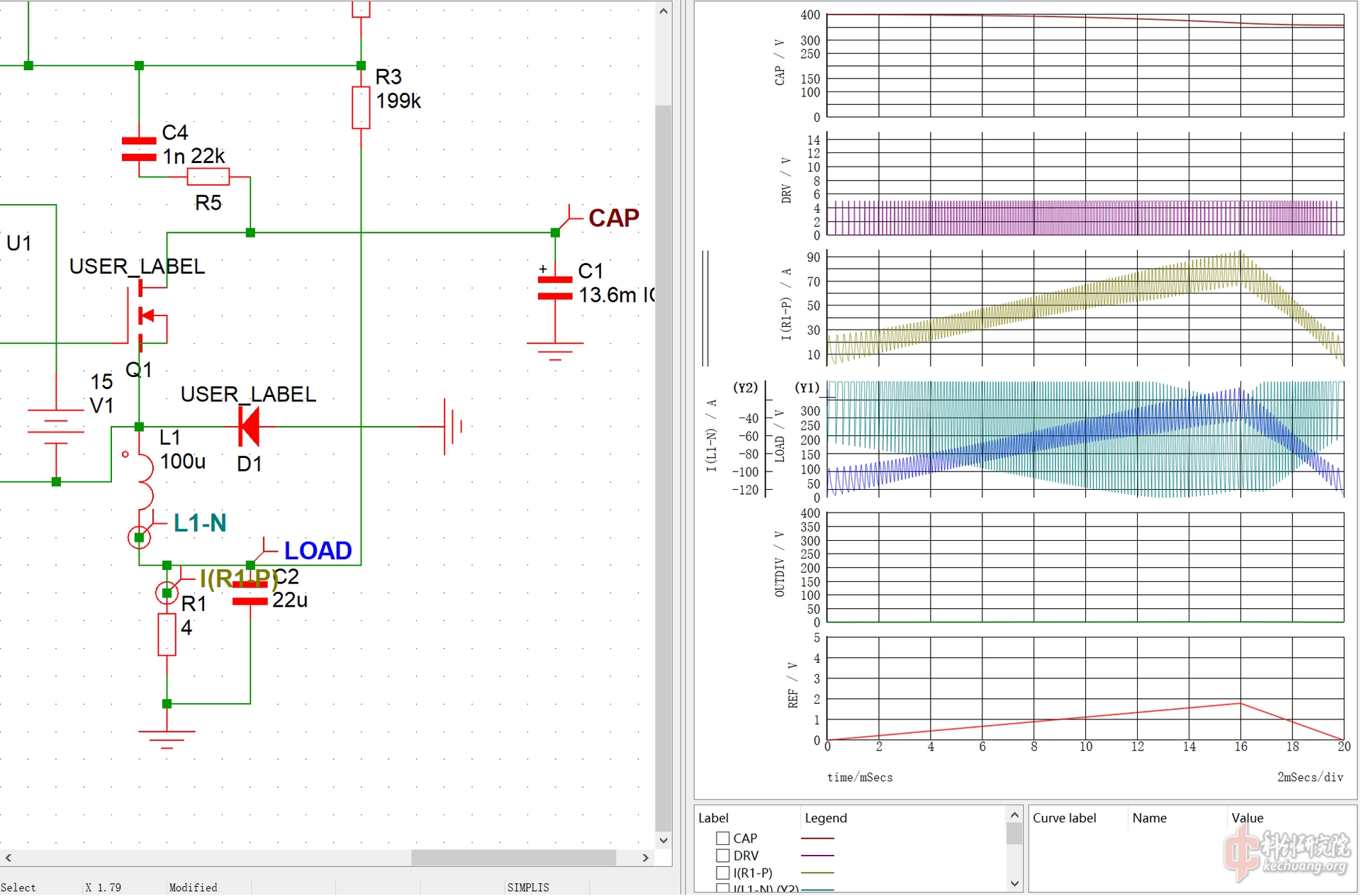
下面的时域仿真波形,可以看到这样的结果,可以看到在10mS之内,输出的包络是严格跟随Vref而变化的
从BODE曲线上来看,在相位裕度的过0点,增益也为0,同样的在超过穿越频率后,会有一个振荡,
前者是由比较器的特性决定的,高速反应的比较器,在小信号电路中表现为一个跟随输入,增益为无限大的压控源。
而对于扰动而言,并不具备直流抑制能力,却可以在穿越频率抑制增益到0的能力,
加大输出电容结果,可以抑制后面增加的振荡的同时,获得很大的输出带宽。
-
同时也可以看到,在这种控制模式下,可以让电感低负载的时候,工作在DCM模式。
而当负载变大接近峰值,会转入接近CCM的模式,
并且由于电感会存在饱和现象,大电流时电感量会剧减,这种控制方式还有一个优势就是
能够根据输出电压改变输出频率,让环路不至于在输出功率巨大时产生常导通,避免振荡现象的发生。
-
如果用普通积分器或者2型补偿器来做,不可避免的会失去这种PFM和PWM混合特性。
所以可以试试这种乒乓的形式,我之前主要用过开环模式,这种BUCK控制模式的表现会更加精准。
电路控制之外,还有初级和次级的匹配,
其中建议加上次级顶环,这样电路参数不至于收到弧长的影响过大,对电弧变直的意义很大。
另外就是尽量工作在上极点,这样增益会相对平缓的增长,也可以有不错的收益。
不错 很强,QCW里面 SKP和BUCK结合可以增加系统的稳定性可以注意一点,剑弧的生成,其实是在补...
感谢指点。看到你详细介绍乒-乓比较器方案,我对比了下比较器方案和定频pwm方案的优缺点:
比较器方案
优点1、响应速度快
优点2、如果允许电感饱和,那么电感体积可以做得更小
缺点1、在负载跳变时,电感进入饱和状态,限制电流增长速度的就剩负载和走线阻抗了(这个时候如果电网电压波动……),为了避免管子损坏,管子的余量要留很足。
缺点2、在后级全桥短路(或者全桥输出短路)时,前级buck会跟着炸。
定频pwm方案
缺点、由于反馈环路存在低频零点,即使穿越频率做得和乒乓方案一致,响应速度也不如它。
优点、不管后级怎么作,前级buck就是不损坏。如果是市电整流输入,buck不损坏可以避免很多麻烦。
问题来了,是否需要这么快的响应速度?我专门测了一下现在这个buck的性能。
Buck输出端并10欧电阻,设置200V峰值,上升沿9ms,下降沿1ms。
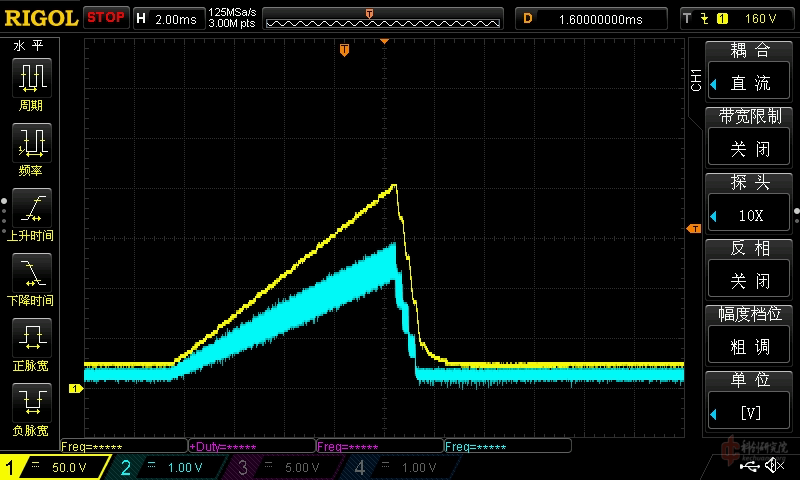
CH1=buck输出电压
CH2=基准电压(为了避免探头干扰基准,测试点在C25上,只过了一阶RC,所以波形很粗)
Buck输出端并10欧电阻,设置200V峰值,上升沿1ms,下降沿9ms。

输出空载,设置200V峰值,上升沿1ms,下降沿9ms。

Buck输出端并10欧电阻,设置200V峰值,上升沿3ms,下降沿7ms。

如果用来产生剑弧,调制信号上升沿是缓慢的,定频pwm方案的响应表现的也没有那么不堪。但如果需要更快速的上升沿,现在这个buck也还有优化空间,比如开关频率提高,穿越频率提高,反馈环零点往高频移,相位裕度设置小一点。
感谢指点。看到你详细介绍乒-乓比较器方案,我对比了下比较器方案和定频pwm方案的优缺点:比较器方案优...
很不错的思考,后级短路后,由于会输出最大值,会产生连炸前桥的情况。
虽然DR系统会有两个保护避免:
1:OCD保护,一般是逐周期检波,这个保护通常很可靠,
2:SKP保护,和以上功能类似
一般在这种情况下,做好PS lead不会产生炸管的情况,但是为了系统的低耦合性。
可以考虑在输出端加入罗氏线圈或者CT,并且基于增加回路阻抗的方式,限制其最大电流。
由于输出BUCK电感的特性,电感电流是不会产生瞬变的,这带来第二个优质的特性。
一旦输出全桥短路,那么电感的电流一定会线性上升。
这样一来,就可以通过电流互感器的监测-保护过程提供了充足的反应时间,
而不会产生类似直接短路的情况。
而以上你提到很重要的一点,电感饱和后,负载瞬变会导致深度饱和的产生。
这就突出设计电感参数的合理性,要牺牲一定效率的情况下,限制DC短路电流以及饱和电流值尽可能大。
-
以上的电路设计思路,如果是74HC逻辑,用AND+DFF既可以实现保护,又可以做其他的保护功能。
相当于做一个专门的OCD,因为纯PWM的形式,也是在给电感持续励磁,多次叠加伏秒叠加,一样会发生饱和。
所以这个问题在close-loop pwm中依然存在,最佳的解决方式就是加过流保护,实现系统间解耦。
-
关于PWM我还有一个思路,你可以考虑用3型补偿器,来实现快速环路补偿抑制,
可以看得出在快速变化的时候,会出现明显的超调环节,如果用3型补偿器,可以在一定程度匹配上升沿。
因为固定上升沿的信号,可以等效为快速变化,把P的环节调到够小,I的环节调到够小。
这样对于普通阶跃响应可能会很慢,但是对于缓升波形,也许可以把“锯齿波”解决很多。
-
甚至还有一个我原来做数字补偿器的思路,如果要锁一个变化的信号。
相当于控制一个线性系统会永远叠加Err误差,这个时候为了避免积分环节长时间累计产生超调。
就要锁斜率,这个斜率用Err/t来表示,同时和Err加权送入PID的输出环节。
这样就可以抵消由于变化导致的超调现象,能够在Fcross和Pmargin不变的情况下。
做到尽可能平缓的跟随效果,这也是控制类似有LC相位滞后系统的一个不错的方法。
-
如果能实现以上的各种功能,其实乒乓方案就显得比较弱了,因为毕竟它的特点在于简单元件发挥不错的性能。
最后如果能让QCW系统完全保持固定运行,可以考虑纯PWM开环,用斜率补偿就可以了,波形也特别好看。


200字以内,仅用于支线交流,主线讨论请采用回复功能。