不错 很强,QCW里面 SKP和BUCK结合可以增加系统的稳定性
可以注意一点,剑弧的生成,其实是在补偿电弧长度不断增加的能量
最近和国外一些爱好者讨论交流这个问题,其实也就是说,普通DRSSTC靠notch和弧容匹配
从槽路瞬间抽取能量,类似激光“调Q”的一个过程,这个触发的方法,是依靠积蓄在PRI TANK的能量。
当电弧增长达一定程度,实现完全匹配,此时产生一个迅速上升的功率,单点电弧产生多条突破、
而剑弧则相反,必须保证功率供给的稳定,而且上升的速度必须严格匹配电弧的增长速度。
根据一些爱好者实验的经验,QCW的输出其实基本上是恒压的,电流的增加维持了电弧的功率增长。
所以你可以试试把SKP的值和保护阈值缩小一点,环路速度再增加一些,尽量做到逐周期限流。
-
关于QCW的BUCK部分,看到你用ASIC芯片做了反馈环,这个是很好的创新。
但是不可否认的是,Gaoguangyan的乒-乓比较器方案,能够在几十KW瞬态输出的基础上,
产生接近20KHZ的穿越频率的高性能,(见下图bode),这样的高频带响应,也可以为输出提供非常优质的跟随。
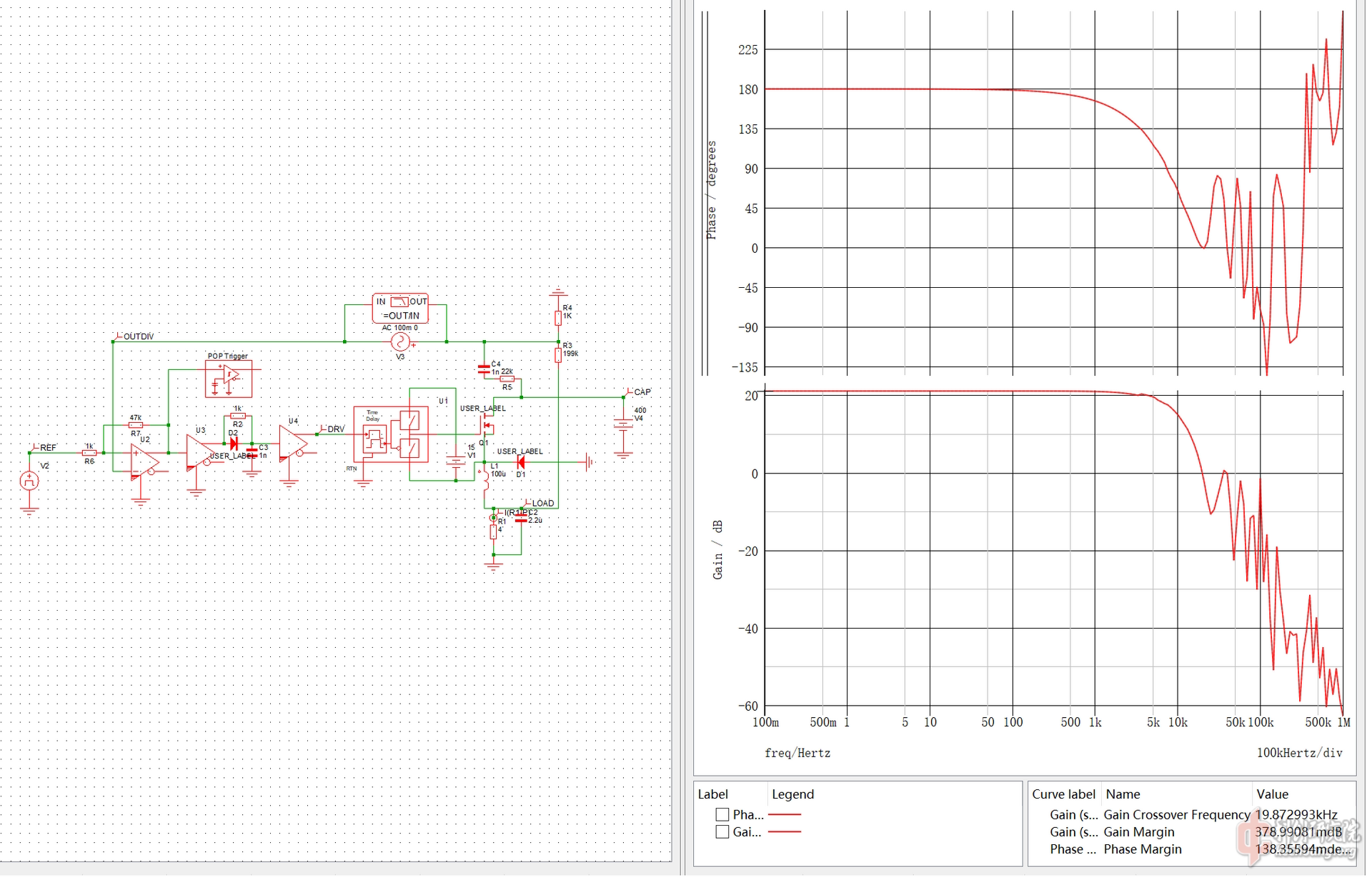
这样的特性可以进一步的让由单片机或模拟信号产生的斜坡稳定跟随输出到VBUS上,会有助于剑弧的稳定增长。
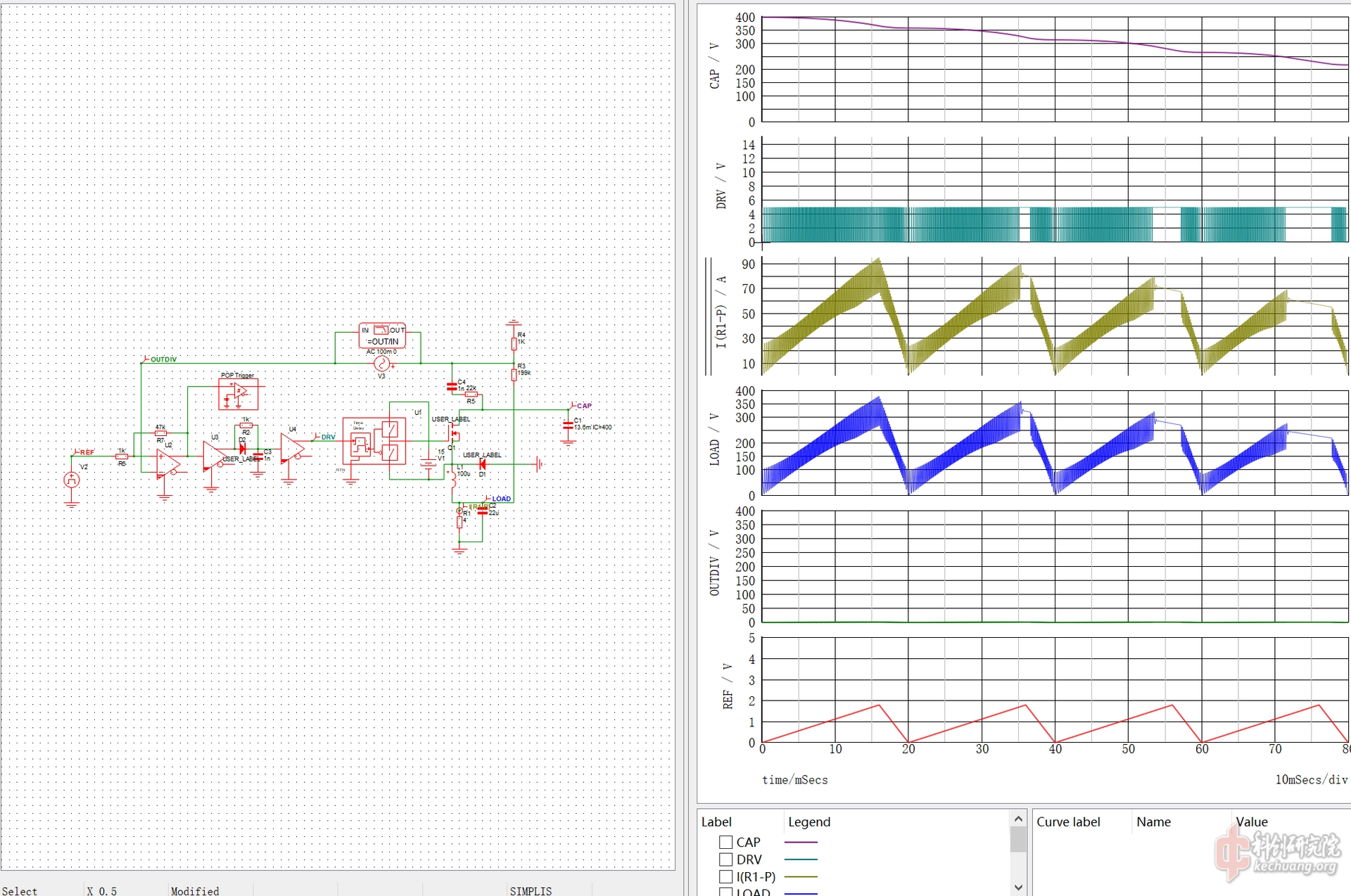
下面的时域仿真波形,可以看到这样的结果,可以看到在10mS之内,输出的包络是严格跟随Vref而变化的
从BODE曲线上来看,在相位裕度的过0点,增益也为0,同样的在超过穿越频率后,会有一个振荡,
前者是由比较器的特性决定的,高速反应的比较器,在小信号电路中表现为一个跟随输入,增益为无限大的压控源。
而对于扰动而言,并不具备直流抑制能力,却可以在穿越频率抑制增益到0的能力,
加大输出电容结果,可以抑制后面增加的振荡的同时,获得很大的输出带宽。
-
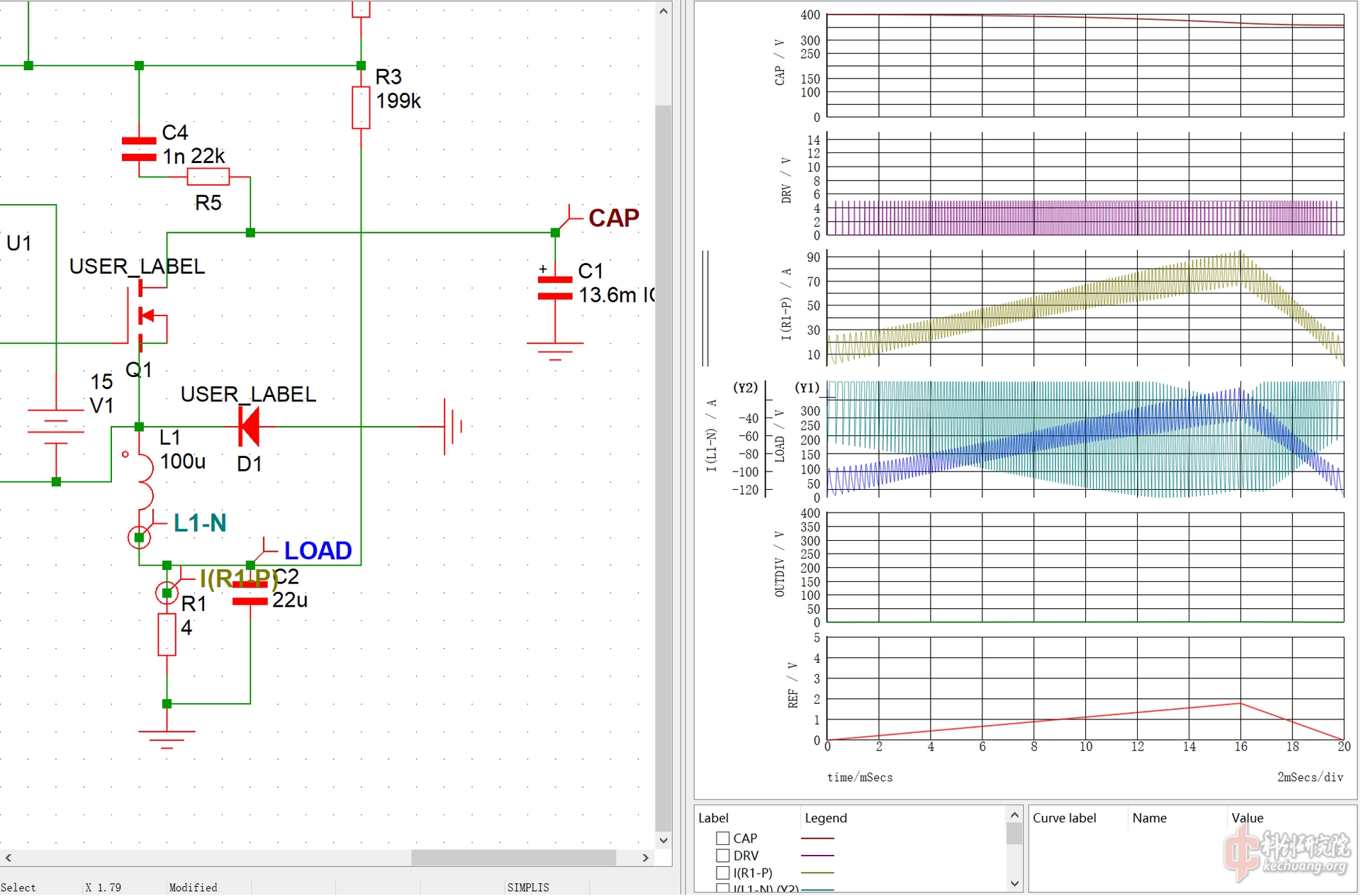
同时也可以看到,在这种控制模式下,可以让电感低负载的时候,工作在DCM模式。
而当负载变大接近峰值,会转入接近CCM的模式,
并且由于电感会存在饱和现象,大电流时电感量会剧减,这种控制方式还有一个优势就是
能够根据输出电压改变输出频率,让环路不至于在输出功率巨大时产生常导通,避免振荡现象的发生。
-
如果用普通积分器或者2型补偿器来做,不可避免的会失去这种PFM和PWM混合特性。
所以可以试试这种乒乓的形式,我之前主要用过开环模式,这种BUCK控制模式的表现会更加精准。
电路控制之外,还有初级和次级的匹配,
其中建议加上次级顶环,这样电路参数不至于收到弧长的影响过大,对电弧变直的意义很大。
另外就是尽量工作在上极点,这样增益会相对平缓的增长,也可以有不错的收益。
| 时段 | 个数 |
|---|---|
| {{f.startingTime}}点 - {{f.endTime}}点 | {{f.fileCount}} |
