加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
齿轮泵限滑差速器是效果极好的成本极低的
一、齿轮泵限滑差速器结构
齿轮泵限滑差速器主要是通过对成本很低的锥齿轮差速器,进行一定的密封,利用半轴齿轮和行星齿轮转动时会产生齿轮泵的效果来实现限滑功能的,所以相比其他的限滑差速器成本很低,与差速锁等也不矛盾。

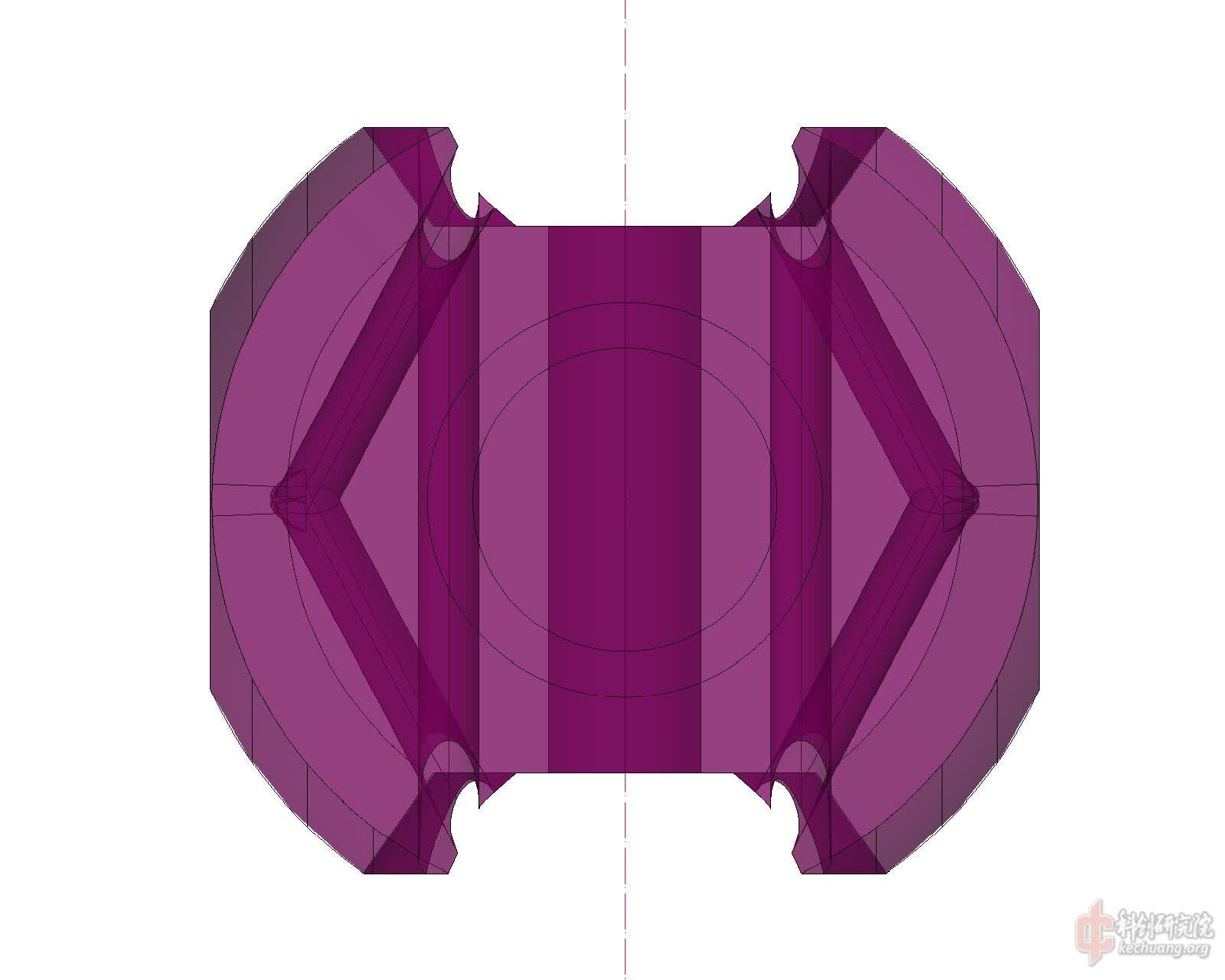
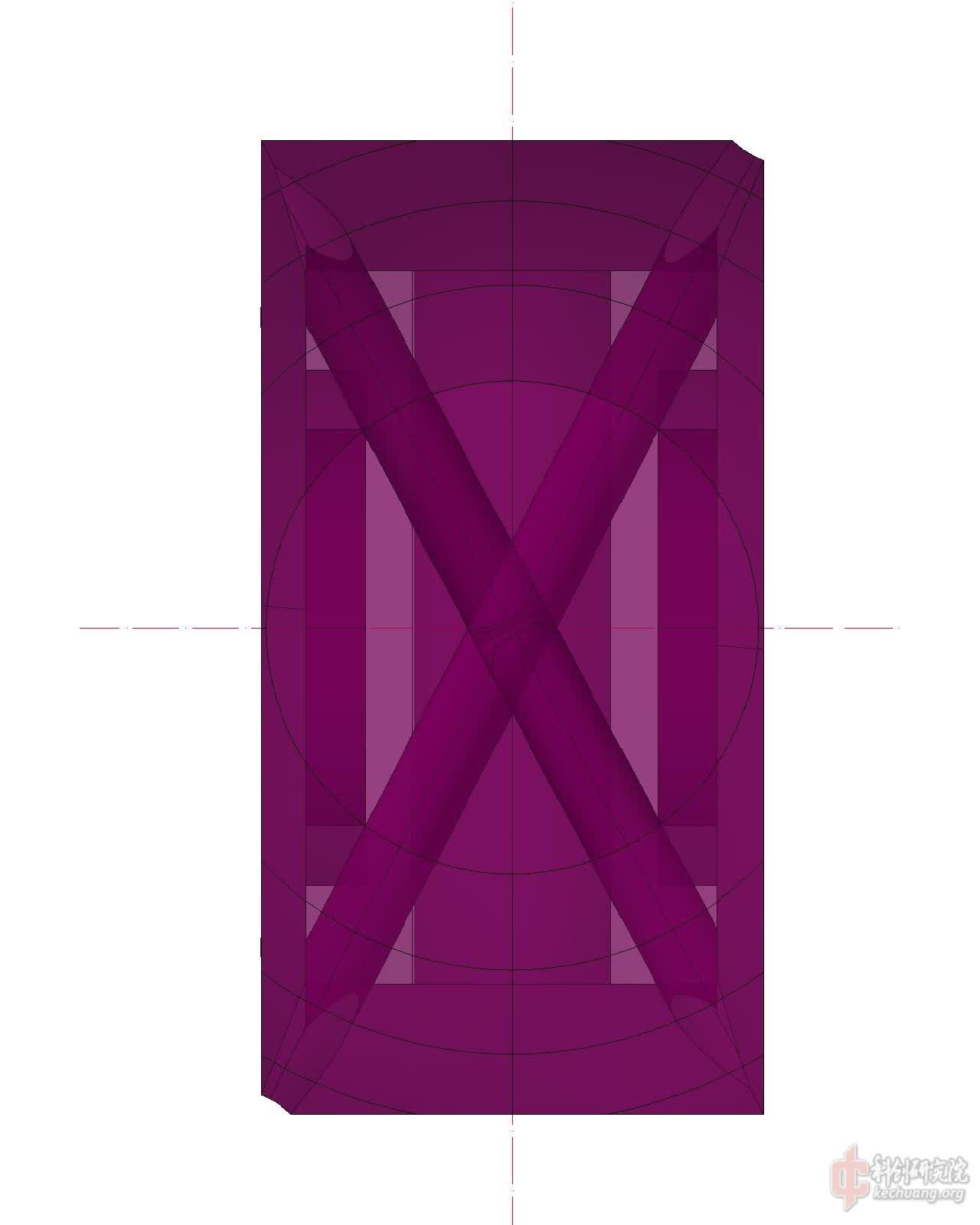
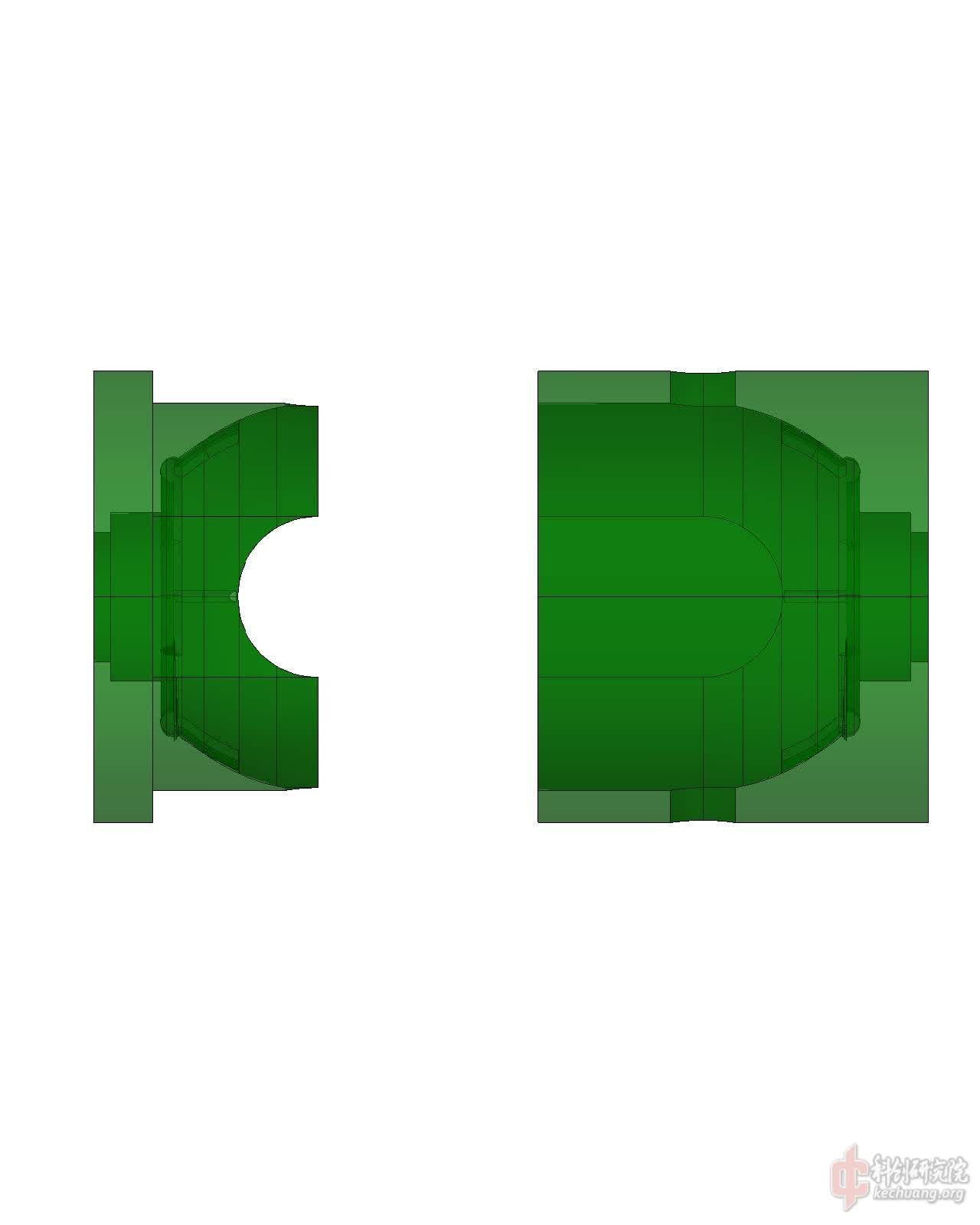
从构造图我们可以看到,与普通的锥齿轮差速器相比,齿轮泵限滑差速器只是增加了中间密封架,对差速器壳进行了密封,所以成本增加不大。中间密封架上面开有管道,可以平衡高压啮合齿轮的压力,如果差速器里边用齿轮油和差速器壳外相同,制造精度要高一些,如果差速器进行封闭,里面可以根据制造精度情况选用高粘度的润滑油,最好是润滑脂,上面的结构没有绘出控制转速差和润滑脂添加管路及螺丝。(这个结构只是一种可行的结构。)
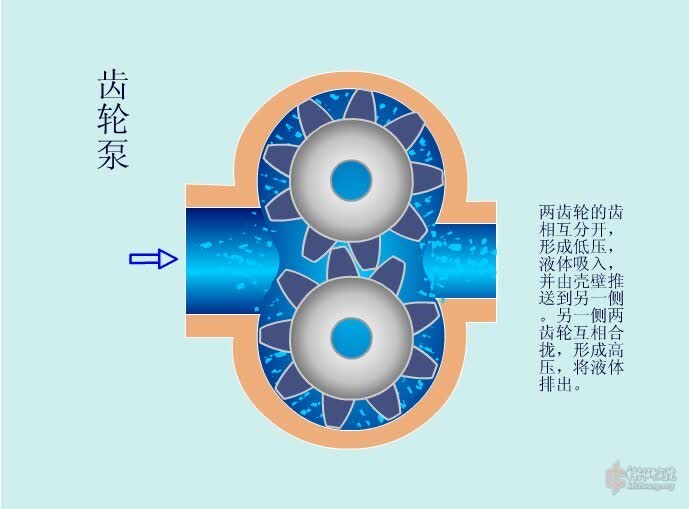
二、齿轮泵限滑差速器原理
三、齿轮泵限滑差速器理论可行性
通过压力容器计算公式,厚度=PD/(2*材料强度-P),通过计算目前的锥齿轮差速器壳的厚度,可以推导出目前锥齿轮差速器壳可以承受的压强,以差速器壳厚7mm,钢材屈服强度为800,差速器壳半径120mm,可承受的压强为88mpa。通过齿轮泵或者液压马达计算公式M=PV/2π来计算,目前的锥齿轮差速器壳厚度,可以承受的扭矩完全可以满足目前差速器的扭矩要求,同样以压强80mpa,转流量20ml/r,可以承受的扭矩为1000nm。也就是目前汽车上面的普通锥齿轮差速器,经过一定的密封处理,完全可以满足限滑差速器的需求。对于制造来说,差速器锥齿轮齿宽齿厚都是比较大的,容易实现较大的容积率,对制造的精度要求不需要太高,差速器壳和外边密封,差速器壳里面添加润滑脂,润滑脂稠度随温度变化小,适应温差大,根据实际情况选用不同稠度的润滑脂即可实现限滑功能。因为齿轮泵限滑差速器是限制行星齿轮和半轴齿轮的相对转速来实现限滑功能的,在正常转弯时转速差很小,几乎不会对差速器的差速功能产生影响,齿轮泵限滑差速器随着行星齿轮和半轴齿轮相对转速变大,阻力也逐渐变大,所以齿轮泵限滑差速器可以在所有车辆上面使用。
齿轮泵限滑差速器完全密封可以实现100%扭矩输出,两侧车轮可以保持同步转动不能差速转动,当然这是不现实的。以目前的制造水平,经查目前的锻造锥齿轮精度可以达到0.02mm,差壳和密封架的精度也按照0.02mm来计算,间隙可以很容易控制在0.1mm以内,加上润滑脂的粘度,密封能力完全可以做到90% 以上的,当一侧车轮打滑时另一侧车轮可以获得90%的扭矩,完全够用了,而且随着两侧车轮转速差增大,因为润滑脂稠度大流速的加快阻力增加更快,不打滑车轮可以获得的扭矩将会远远大于90%,即便密封程度做到60%、70%或者80%同样也可以满足车辆的脱困要求。如果选用高精度制造同时选用润滑脂,这个时候可以通过阀门来控制两侧车轮的转速差。
四、齿轮泵限滑差速器的优势
因为齿轮泵限滑差速器利用的是齿轮泵的原理,限制半轴齿轮转速的是润滑脂以及转动时产生的压力,所以两侧车轮不会出现大的转速差,可以有效的减小对差速器的冲击,减小差速器壳体和锥齿轮的转速,减小差速器发热,选用润滑脂更有利于差速器润滑,所以寿命更长。因其构造简单,是利用半轴齿轮和行星齿轮相对转速越快限滑扭矩越大的原理,所以齿轮泵限滑差速器是目前成本最低效果最好的限滑差速器,普通车都可以使用。
与拖森等扭矩型限滑差速器相比,不会因为附着力低的车轮影响到附着力高的车轮获得更高扭矩,而且齿轮等部件少,重量更轻。
与摩擦片式限滑差速器相比,不会出现磨损发热现象,限滑性能下降的问题。
与电子控制式的相比,电子控制终究离不开刹车或者摩擦片来实限滑,都会产生热量降低使用寿命。
齿轮泵限滑差速器纯机械结构,反应更快捷寿命更长,结构简单成本极低,是目前成本最低效果最好的限滑差速器。并且与差速锁等装置不矛盾,可以并存。
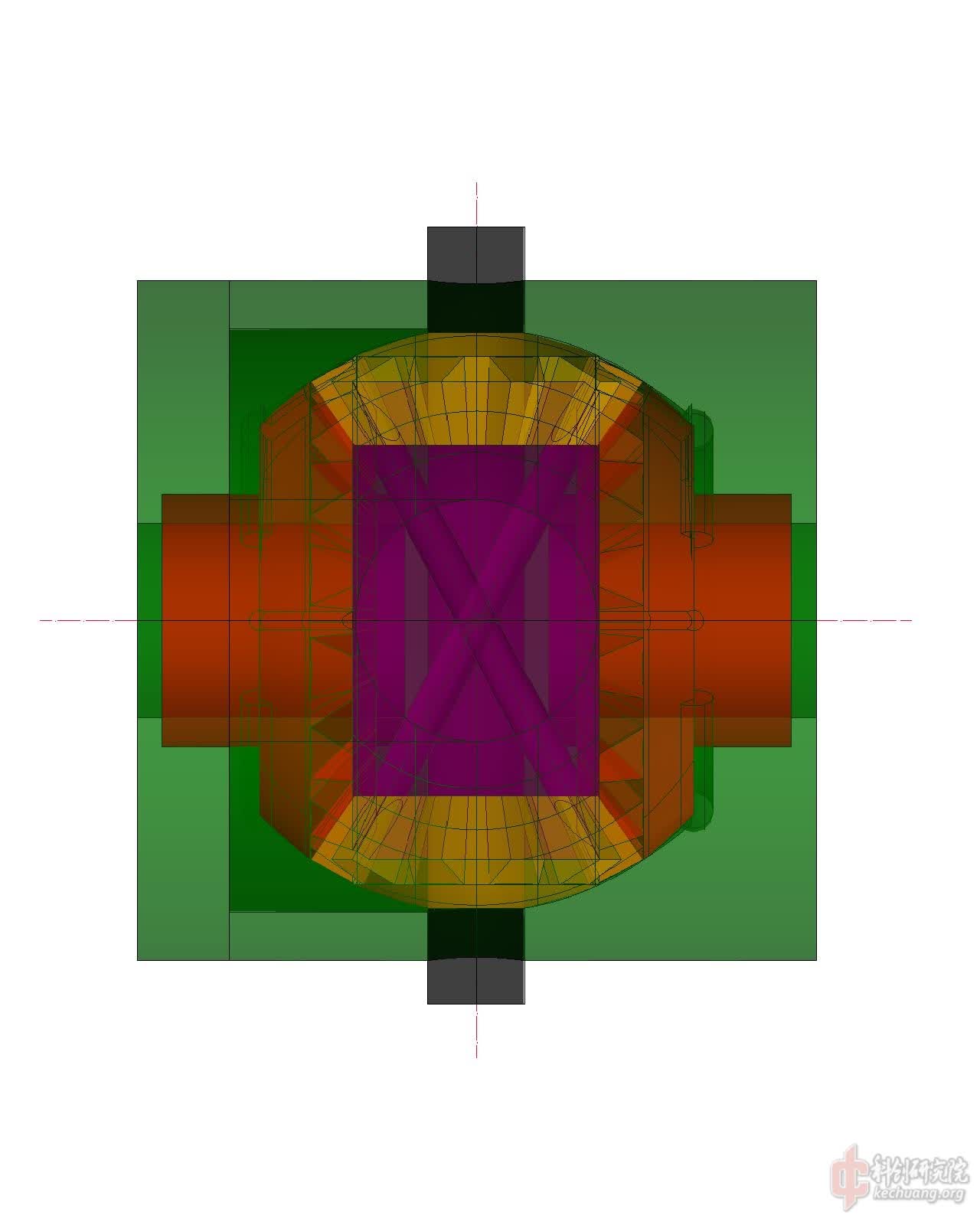
五、齿轮泵限滑差速器的优化


图片中蓝色的为螺丝,中间螺丝用来控制中间密封架和差速器壳,其他螺丝用来添加润滑脂和控制润滑脂流动,控制润滑脂流动的螺丝换成压力控制方式可以实现更好的限滑效果。
因为齿轮泵限滑差速器是依靠齿轮油的压力来实现限滑功能的,所以其润滑更好,更有利于延长差速器的使用寿命。齿轮泵限滑差速器具有很高的开发价值,希望能够合作。

