加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
SR 电机拥有 100 年以上的历史。 SR 电机有很多 缺点(噪声等),但随着电机控制技术的进步,有望 开发出能够扬长避短的控制方法,因此 SR 电机近来获 得了较高的关注度。
将磁阻变化转化为转矩的电机
SR 电机是利用磁阻变化产生转矩的电机。 有刷直流电机、无刷直流电机等利用线圈(电磁体) 和永磁体间的引力、斥力获得转矩。 与之相对,SR 电机不会用到磁体间的引力和 斥力。
磁 阻磁阻即磁阻力
磁阻,简单来说就是磁阻力,表示磁路中磁通量 通过的难易程度。 相互靠近的磁体具有向磁阻减小的方向移动的特 性,而 SR 电机正是利用了这一特性。也就是说,在 SR 电机中,转矩产生在磁阻减小的方向上。002 专题 如何确定电机特性
利用磁体的引力
以铁钉为例,铁钉靠近磁体就会被吸引。铁钉被 磁体吸引这一现象就是铁钉向磁阻减小的方向移动的 表现(图 1)。
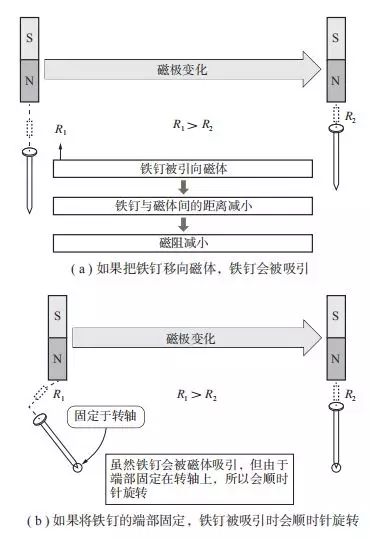
图1
开 关切换线圈电流
开关是指切断励磁绕组(被磁化的线圈)的电流, 或改变电流流向。 SR 电机有两种类型,一种的线圈位于转子侧,另 一种的线圈位于定子侧。无论哪一种,只要能根据电 机线圈的旋转位置及时切换励磁绕组,并对准磁阻减 小的方向,就可以产生单向转矩,使电机稳定旋转。SR 电机的结构

图2
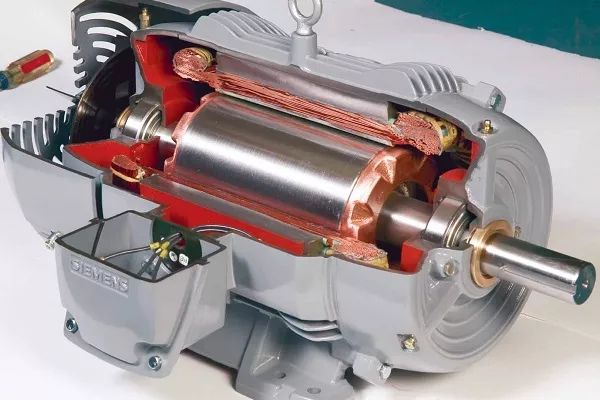
图 2 所示为明和制作所生产的超小型 EV 用 SR 电 机(输出功率为 3.5 ~ 7kW)。

图3(a)

图3(b)
图 3 所示的 SR 电机也是明和制作所生产的,输 出功率仅为 300W 的小型电机。图 3(a)所示为取下 电机传动轴端盖,显露出的电机组成部分:
·定子铁心(6 槽叠层铁心线圈)
·转子铁心(4 凸极的叠层铁心)
·轴 承 图 3(b)所示的传动轴盖子一侧的轴端上还装有 ·霍尔传感器
各组成部件的作用
(1)定子(铁心 + 线圈) 定子固定于壳体(磁轭)上,不会旋转。 定子由 12 个连接成圆形凸极结构的铁心构成。线 圈按照集中式绕组的形式缠绕在定子铁心上(图 4)。

图4
电机的线圈数(槽数)为 12,4 个线圈为一相,是三 相绕组。 从各相两端引出的共计 6 根接线连接在壳体的 6 个端子上。 定子铁心为了避免涡流影响使用硅钢片制成的叠 层铁心。 绕组端子与输入端(电源)连接,电源提供脉冲 电压。当电流流经绕组时,定子铁心会变成强力的电 磁体。
转子(铁心)

图5
图 5 所示为转子。转子由硅钢片叠层铁心和曲轴 构成。转子有 8 个凸极,没有线圈。 SR 电机的定子铁心和转子铁心都采用凸极结构的 设计,称为双凸极结构。
采用双凸极结构的理由
采用此结构是为了利用转子的旋转增大磁阻变 化量。 转子旋转时,转矩取决于转子位置 θ 的磁阻变 化量。
霍尔传感器 + 转轴 + 定位磁体
图 3(b)所示为霍尔传感器、转轴(曲轴)和定 位磁体。 霍尔传感器固定在转轴上。使用霍尔传感器检测 转子的磁场,可以确定转子的位置 θ。 或许有读者朋友会对使用永磁体有疑问。使用永 磁体并不是为了产生磁通量用以驱动,而是为了检测 旋转位置,所以不会使用昂贵的钕铁硼永磁体(以下 简称钕磁体)。当然也有不用磁体的方法,但笔者通 常会使用便宜又简便的永磁体。 霍尔传感器有 3 个三相绕组,共 6 根信号线。
往期精彩

