加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
电机的种类
电机可大致分为直流电机、同步电机和异步电机。直流电机作为发电机使用时称直流发电机。图 1 所示为适用于大多数 EV 的驱动电机的分类。
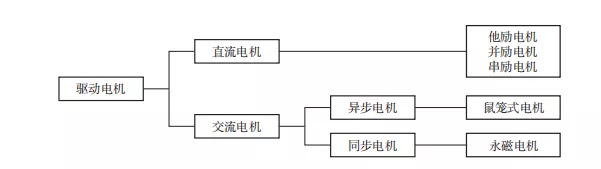
图1
直流电机用作直流发电机
直流电机可通过改变直流电压从而改变转速,可 变速度常会被应用到不同场景中。直流(有刷)电机会发生电刷磨损,因此必须维 护电刷,这是其缺点。不过其运行速度极易控制,现 在仍被广泛应用。
同步电机用作发电机
一方面,异步电机和同步电机是交流电机,一般 通三相电工作。几瓦以下的小型电机多使用单相电。本文内容以学生方程式 EV 搭载的 10kW 以上的驱动电 机为对象,使用单相电的小型电机在此不作详解。同直流电机一样,异步电机也发电机,但一般作 为电机使用。另一方面,同步电机多用作商业用电发电机,用 途比较广泛。
异步电机与同步电机的运转方式均多种多样
最近,随着电力电子技术的发展,异步电机与同 步电机均可作为可变速驱动电机广泛应用。以前的交 流电频率为 50Hz 或者 60Hz,现在的电力电子技术可 以实现交流电频率的自由更改。原来电机只能按照一 定转速运转,现在轻易就可以实现不同转速运转。异步电机常被用在火车上。永磁电机属于同步电 机,多用在 EV 或者 HEV(混合动力车)上。
直流电机的工作原理
图 2 所示的是直流电机的工作原理。
图2
在图 2(a)中,电流沿着箭头方向流动,上方的线圈为 S 极,下 方为 N 极。N 极、S 极相互吸引,S 极、S 极相互排斥, 电枢朝着逆时针方向转动。电枢旋转 90°以上,便可 得到图 2(b)。电枢 a 将要旋转 90°时,之前的 S 极 变成 N 极,N 极变成 S 极。磁极相互吸引或排斥,使 得电枢朝着逆时针方向转动。如前所述,在换向器和电刷的作用下,电流方向 不断发生改变,电枢得以持续转动。
三相异步电机的工作原理—旋转磁场
图3
如图 3(a)所示,以时间相位互差 120°的三相交 流电,向空间相位互差 120°的三相线圈通,0°时产生 磁通量的方向如箭头所示,U 相最大(设为 1.0),V 相和 W 相各为 -0.5。60°时,W 相为 -1.0,U 相和 V 相各为 +0.5。三相电流随着时间从 0°渐渐变化为 60°时,磁通量变化如图 3(d),顺时针方向旋转了 60°。如此反复, 磁通量顺时针旋转,便产生了旋转磁场。另外,U 相线圈、V 相线圈、W 相线圈按照顺时 针方向排列,以图 3(a)所示的 U、V、W 相应通电 可产生顺时针转动的旋转磁场。如果按照逆时针方向 排列,则可产生逆时针转动的旋转磁场。也就是说,一旦更改三相异步电动机三相线圈中 两相的顺序,旋转磁场的转动方向也会随着改变。
同步电机与直流电机输出转矩的原理类似
同步电机与异步电机均随着旋转磁场而转动。同 步电机的转子受到旋转磁场N极和S极的吸引而转动, 其转速与旋转磁场相同。也就是说,同步电机转矩输 出的原理与直流电机类似。
异步电机输出转矩的原理
鼠笼式线圈切割旋转磁场,鼠笼式线圈中通过电 流,异步电机输出转矩。这种转矩输出的前提条件是 通电鼠笼式线圈切割磁感线,而转子与旋转磁场同步 转动时不存在磁感线切割,因此无法输出转矩。即异步电机必须具备滑差,滑差公式即是之后讲 到的式(7)。
直流电机的基本结构
磁体固定 + 线圈旋转 + 电刷
直流电机的输出转矩是由磁场(永磁体)磁通量 与电枢电流间的电磁力作用产生。磁体位于定子上, 线圈(电枢)则排布在转子上。电刷可使电流通过线圈, 换向器则可保证转矩持续输出。
同样适用于学生方程式
EV 永磁直流电机利用磁体制造磁场,常用于小型设 备。此种电机无法调整磁通量,但可通过控制流经线 圈的电流来控制转矩输出,适用于学生方程式 EV。
12 槽 8 极直流电机的例子
小型直流电机的的结构如图 4 所示。
图4
提起小型直 流电机,大家或许多会联想到适用于模型的 3 槽 2 极 电机,而这是适用于学生方程式EV的电机的一个例子。图 4 所示为 12 槽 8 极电机,采用的是薄硅钢片叠层电 枢铁心和电枢线圈。为了抵消齿槽部分的磁阻差异引 起的齿槽转矩,设计为斜槽式。电枢线圈连着换向器,通过电刷供给直流电。另外, 永磁体被排布并固定在磁轭内侧。
直流电机的类别
直流电机采用直流电源,通过励磁线圈(直流线圈) 而非永磁体产生磁场。此种类型的电机大致分为三类:a 他励电机:电枢线圈与励磁线圈分开供电。b 并励电机:电枢线圈与励磁线圈并联,由同一 电源供电。c 串励电机:电枢线圈与励磁线圈串联,二者电 流相同。图 5 中的“F ”表示励磁线圈。
图5
直流电机特性的基本公式
电机端子电压 V :
V = E + Ra Ia (1)
式中,E 为反电动势;Ia 为电枢电流;Ra 为电枢线圈电 抗与电刷接触电阻之和。另外,反电动势 E 和转矩τ 的计算方法如下。
E = K1nΦ (2)
τ = K2ΦIa (3)
式中,K1 和 K2 为比例常数;n 为转速;Φ 为每极的磁 通量(Wb)。由式(1)和式(2)可得出转速
n:n =( V − Ra Ia)/ K1Φ (4)
电机的机械功率
P(W):P=ωτ (5)
式中,角速度 ω=2πn(rad/s)。
转矩和转速的关系
包含永磁式他励直流电机,纵轴表示电机转矩,横轴表示转速,控制电枢电流保持恒定,便可得到图 6。
图6
这里提到的基底转速指的是,额定转矩下转速升 高,电压一定,功率达到最大值的速度。达到基底转 速前,可得到最大转矩。另外,电机的转速大于基底 转速时,转矩随着转速上升而下降。
基底转速与转矩的关系
大于基底转速时,端子电压远远低于额定电压, 接着在较弱磁场作用下,转速升高。永磁电机不容易 形成弱磁场,仅有恒转矩驱动这一特性。式(3)中,磁通量一定时,转矩与电枢电流成比 例关系。控制电枢电流便可控制转矩。磁通量减半, 转矩也减半。由式(4)可知,端子电压与电枢电流恒 定时,转速变为 2 倍,电机功率是恒定的。
并励直流电机的基本特性
与他励电机相同
并励电机与他励电机基本相同。设计控制电路时 应避免励磁线圈和电枢线圈控制系统的相互干涉。
串励直流电机的基本特性
电枢电流 = 线圈电流
如图 5 所示,串励电机中励磁线圈与电枢线圈的 电流相同,所以不能像他励或并励电机那样,独立控 制各部分的线圈电流。图 7 表示的是串励电机转速与转矩的关系。如前 所述,串励电机只可控制一个电压,不同电压下的特 征表现如图 7 所示。
图7
串励直流电机适用于电力机车
该电机的特征为启动时可获得较大转矩。以电力 机车为例,如 EF65(MT52,425kW×6 台 = 2550kW) 或 EF66(MT56,650kW×6 台 = 3900kW)。另外,由图7也可得知,转矩减小时转速大幅升高, 一定要注意,不可空载运转。磁场电流(= 电枢电流) 在空载时减小,式(4)中的分母Φ 趋近零,因此可知 转速会急剧升高。进行串励电机单体试验,或将 EV 驱动轮悬空测 试电机时,要加倍注意。否则,有可能导致电枢线圈 或换向器等零件散架,造成电机损坏的严重后果。异步电机的特性
三相线圈 + 鼠笼型转子
通常情况下,异步电机的定子为三相线圈,转子 为鼠笼式线圈,转速取决于极对数和电源频率。利用 极对数和电源频率计算得出的转速称为同步转速。负载状态可引起滑差(Slip),转速会随着负载转 矩变化。
异步电机特性公式—同步转速和滑差
用 ns 表示同步转速,f 表示频率,P 表示极对数, 则同步转速可通过式(6)计算。另外,用 n 表示转子 的转速,则滑差 s 可通过式(7)计算。
ns = 120 f /P (6)
s = (ns − n)/ ns (7)
滑差和转矩的关系
功率恒定时产生的滑差称额定滑差,电机容量不 同,额定滑差也会有不同程度的差异。EV 用电机的功 率多在 10 ~ 50kW,滑差差异约在 5% ~ 3%(总的来 说,容量越大,额定滑差越小)。由式(7)可知,非工作状态的滑差值为 1;同步 转速运行时的滑差值为零,需注意滑差的变化形式。典型的异步电机滑差 - 转矩特性可用图 8 表示。
图8
该图表示了电压与频率一定,只改变滑差值时,转矩 的变化情况。滑差为零时,转矩也接近零(严格来讲 是负值)。另外,当滑差达到某一值时可以得到最大 转矩,称为堵转转矩。利用 T 形等效电路可以得到异步电机的特性。若 通过设计值或实测值得知各电机常数,便可通过电路 计算出转矩或电流等特性。T 形等效电路如图 9 所示,电路有 4 个磁阻,其 上标有各自的耗电量。
图9
异步电机的结构
异步电机的结构如图 10 所示。
图10
其中,图 10(a) 所示为三相定子绕组,图 10(b)所示为鼠笼式转子。图 10(b)不能很清晰地表示转子的导条部分,可参照 图 10(c)所示的树脂材料 3D 打印模型。
工作原理
对异步电机的定子绕组施加三相电压时,便会产 生旋转磁场,转子的鼠笼式线圈切割磁感线,就会产 生转矩。转子与定子绕组的旋转磁场转速相同时(以同步 转速旋转),旋转磁场与转子呈相对静止状态,无法 发生磁感线切割,因此无电磁感应,不产生转矩。励磁绕组电机和永磁电机 同步电机的定子和异步电机一样,通常是三相绕 组,结构也跟图 10(a)几乎一样。转子直流磁场的产生方式,转子,可以大致分为励 磁绕组转子和永磁体转子两种。图 11 所示为 4 极电机 的转子例子。
图11
励磁绕组同步电机转子
图 11(a)所示为一般制动线圈凸极同步电机的 转子。直流供给励磁绕组,小型电机等通过滑环供电。制动线圈在负荷急剧变化等产生负荷角扰动时,使振 动迅速收敛。类似于异步电机的鼠笼式线圈。
永磁同步电机转子
图 11(b)所示为单纯的磁体形状转子。永磁体 电机的磁体,近年来使用钕铁硼永磁体和钐钴系磁体 等。这些磁体的残留磁通密度在 1T(特斯拉)以上, 并且耐热性高,有利于电机的小型化。如上所述,电机大致可以分为三种。实际制作 EV 时,如果没有判断基准,是无法作出选择的。另外,在可选电机受限的情况下,如何提升 EV 性能也是在比 赛中取胜的关键。因此,以下就电机选择要点进行说明。
是选择电机的转矩,还是选择功率
起步瞬间的功率是多少?
电机的功率 P(W)和转矩τ(N·m)存在 P= ωτ 的关系,见式(5),如果将相当于转速的ω = 2πn(rad/s) 值定为 0,功率值也将是 0。也就是说,无论产生多大 的转矩,如果转速为零,功率也是零,这一点需要注意。也就是起步的瞬间,电机的功率为零。
想提高零起步加速性能时
图12
图 12 显示了固定转矩、改变转速时的功率变化。正如式(5),功率会随着转速上升而直线上升。所以要实现 EV 加速,电机的转矩τ,严格来讲, 轮胎接地面的驱动力就变得尤为重要。为了得到更大 的加速度,增大电机的转矩,选择增大接地面驱动力 的齿轮比是关键。为了缩短学生方程式 EV 的加速时间,使用启动 时转矩大的直流电机也是一种方案。
想增大最大速度时
另一方面,电机的功率恒定时,相对于转速,电 机转矩变化将会如图 13 所示。
图13
在这种情况下,由于转矩是恒定的,当转速变为 2 倍时,转矩变为 1/2;为 3 倍时,转矩变为 1/3。也就 是说,转速越大,转矩也相应地越小。车辆的行驶阻力,大致与速度的平方成正比,因 此电机的功率与速度的立方正相关。假定时速 300km 时功率为 300kW(并未提升加速性),如果要将此车 辆的时速增大到 330km,电机功率 Pm 应为,
也就是说,为了将速度增大 10%,需要将功率增 大 33%。总之,为了增大车辆的最大速度,需要搭载 大功率的电机。应该追求的并非最高速度,而是加速性能!纵观学生方程式比赛,可分为加速(0-75m 直线 行驶),自动交叉(8 字行驶),耐久(22km 耐力行驶) 三种。可以说并非是以最高速度长时间持续行驶的比 赛。因此,考虑重视车辆加速性能,降低目标最高速 度是比较妥当的。
电机转矩和电机尺寸
追求转矩和功率都大的电机
都想要实现转矩也大、功率也大的电机,如果真 的是这样会出现什么情况。电机功率的计算,如前所述是在转速基础上乘以 转矩,单纯地把电机转速调为 10 倍的话,电机功率将 会变为 10 倍。但是,电压也是 10 倍。如果无视机械 和热能的限制,这个方法是成立的。也就是说,电机 功率和电机尺寸之间没有固定的关系。
将电机尺寸加大的情况
在此一起来思考一下,固定转速,加大电机尺寸 的情况。电机的电流密度及磁通密度 恒定时,将电机的长、宽、高各自调整为 2 倍,电压 会变为 4 倍,电流也变为 4 倍,电机功率则变为 16 倍。也就是说,体积是 2 的立方倍,也就是 8 倍;功 率是 2 的 4 次方倍,也就是 16 倍。即转矩会变为 16 倍, 大型电机能节约材料。另外,减小尺寸的情况与上 述相反,需要注意(各自调整为 1/2 时,体积将变为 1/8,电机转矩将变为 1/16)。
相比低转速、大转矩,高速电机更适合
综上,电机的转矩是由电机尺寸决定的。对于驱 动电机,将低速大转矩电机大型化的结果不会太理想。如果电机功率一定,使用高速电机的车辆将会更小型、 轻量。
为了使用高速旋转电机
但是,EV 的轮胎外径是确定的,确定了希望到达 的最高速度,轮胎的最高转速也就确定了,电机的转 速和齿轮比也就可以确定了。如果齿轮比选定,高速 电机无法使用到最高速度,则齿轮比越高,轮胎驱动 力越低,加速性能越差。此连载的下一篇将会探讨车辆性能,改变电机转 矩、电机功率、齿轮比、轮胎外径等参数模拟比赛时 间相当重要。在此,对电池消耗进行认真研究也非常重要。如 果使用了超出需求的大功率电机,电池电量的消耗会 很快,可能无法跑完持久赛的20圈,因此模拟尤为重要。
选择何种电机
推荐选择直流有刷电机
电机和控制装置有分别购买和成套的情况,如果 是分别获取的,推荐直流有刷电机。如果选用交流 PM 电机(永磁电机),或者异步电机,则需要另行制作 或者购买逆变器。另外,控制方面还通常需要向量控 制理论和电机常数方面的知识,要么有电子工程学的 专业人员,要么有专业组织的援助,否则会格外困难。永磁直流电机没有励磁回路,只要单独控制电枢 电流就能控制转矩,使用断路器或电阻控制电压,就 能简单实现转矩控制。直流电机控制相对比较简单且 入门难度低。
需要注意的电机规格
电机规格存在额定值和最大值,因此检查过电流 承受能力和最大转速及最大电压尤为重要。在比赛中 电流和电压在额定值以内的情况较少,并可能相当频 繁地超过额定值使用,因此事前研究即使超过何种程 度,电机和控制装置也不会损坏是非常重要的。直流电机的换向器不会发生闪络,只要机器不损 坏,就能按照相当的速度和功率行驶。
使用励磁绕组电机的注意事项
励磁绕组电机尽管能够控制励磁绕组电流,但通 常励磁电流的控制方式与永磁电机控制方式相同。不过,由于励磁绕组电流能够控制,增大励磁电 流时,电机的反电动势会变大,能量会返回到电池里, 因此可再生。另外,永磁直流电机的反电动势无法变大,所以 实现再生需要使用再生断路器等。
使用串励电机时的注意事项
串励电机的控制系统跟永磁直流电机相同,由于 其特性是启动转矩非常大(图 7),所以车辆的加速性 能优越。但是空转时非常危险,所以在进行电机单体测试和车轮浮空试验时需要注意。并且,它也像永磁 直流电机一样,需要设计电路才能实现再生。
选择控制装置的注意点—选择转矩控制型
以上阐述了单独选择电机的情况。如果能成套购 买电机和控制装置,首先要确认其是否为转矩控制型。驾驶员从车辆的行驶状态中使用油门控制转矩。由驾 驶员目测速度,控制速度。
获取电机特性
接下来是电机的特性。将图 7 的横轴作为电机转 速,获取电机特性。尤其是启动时的最大转矩,按最大转矩可以达到 的最大转速,获取电机最高转速和当时的最大功率等, 标示于图表上。改变车辆质量和轮胎外径、齿轮比等,模拟比赛 中的速度和时间,归纳整理各个规格的特性。当然, 电池电量的消耗也要事先计算。再重复一次,在学生方程式大赛中,应该优先加 速性能。在面临选择最高速度,还是加速性能时,重 视加速性能的做法能成就更酷的车辆。
1
END
1














