

这个不是被吐槽太长了么
加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
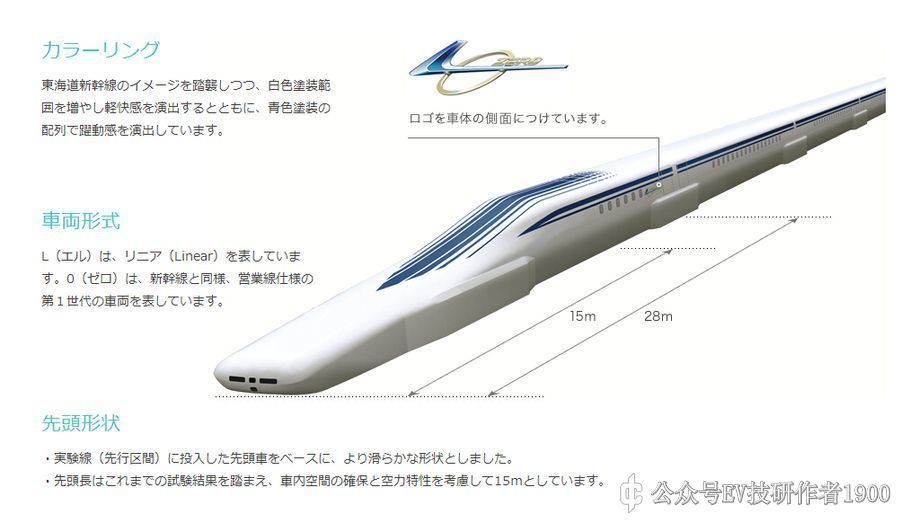
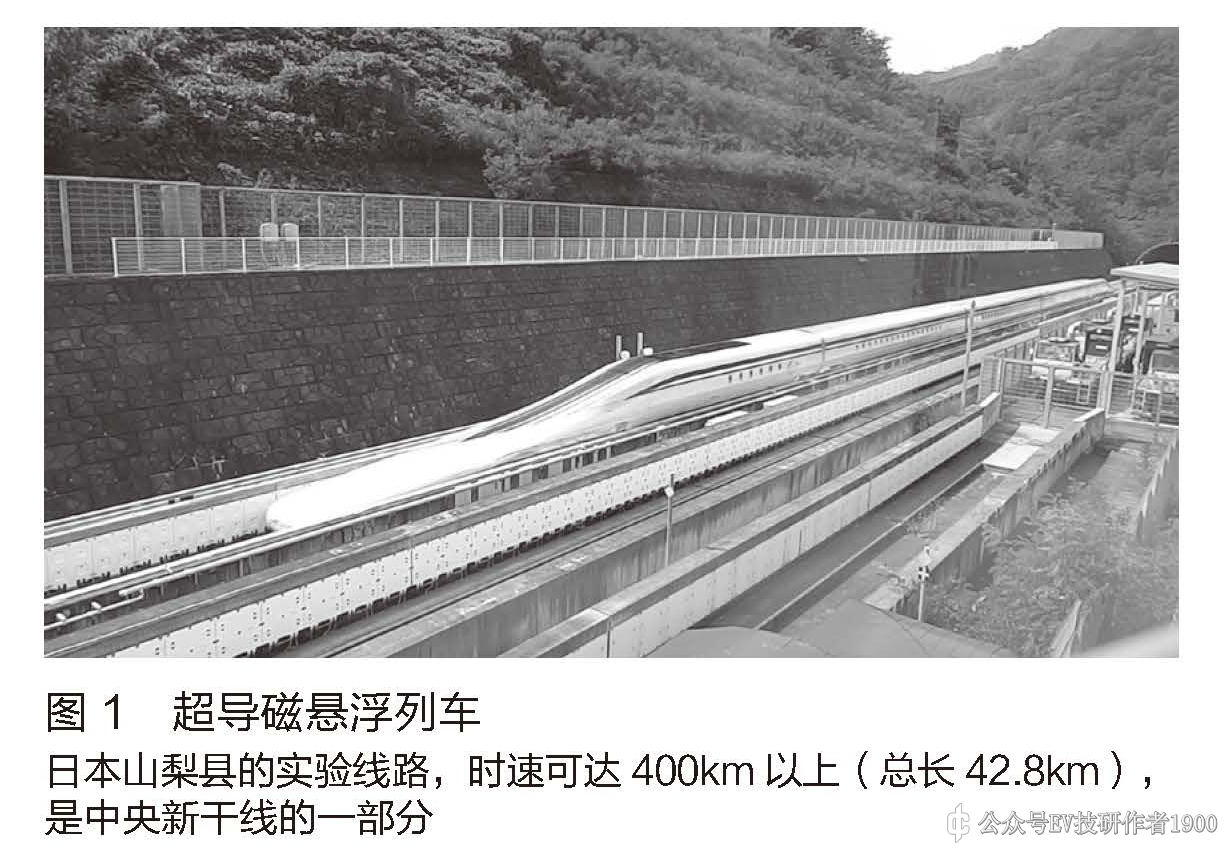
超导磁悬浮(Superconducting Maglev )列车指借助磁力悬浮车体,并以高速行驶的列车。世界首辆超导磁悬浮列车计划于2027 年开通,日本中央新干线仅需45min 就可以从东京到达名古屋(图1)。超导磁悬浮列车的研究工作最初由日本国营铁道技术研究所负责,中央新干线的开发主要由JR 公司负责。此线路计划于2037 年实现1 小时从东京到大阪。
高速行驶原理
高速行驶需要磁力
高速行驶是超导磁悬浮列车的最大特征,东京至大阪的用时不到目前新干线的一半。超导磁悬浮列车利用磁悬浮实现高速行驶,不会用到车轮。
利用磁体的引力和斥力
磁体具有N 极和S 极,同极相斥,异极相吸,利用磁极间的引力和斥力可实现行驶(前进、制动)。如图2 所示,

超导磁悬浮列车车头为N 极。假设在列车前方放置磁体的S 极,异极间产生的引力就会拉动列车,使列车前进。期间,加速度随磁体间距离的缩小而增大,相互吸附后加速度消失。在列车前方放置磁体的N 极时,同极间产生的斥力给列车施加与前进方向相反的加速度,列车减速,直至速度变为零,甚至后退。
控制列车前方磁极位置
调节并移动图2中前方磁体与列车磁体间的距离,就可以控制列车持续前进并改变加速度。这就是简单的线性驱动原理。
搭载大量线圈
移动车体前方的磁体,并控制其相对车体的位置十分困难,于是选用电磁体作为驱动磁体。接通电流,电磁体就能产生磁力,切断电流,磁力也随之消失。如图3 所示,

通过开/ 关电磁体,可使磁体向前移动。图4 所示为利用电磁体开关切换的直流线性驱动示意图。超导磁悬浮列车的行驶利用了此原理。

交流驱动
超导磁悬浮列车为交流驱动,利用交流相位差,切换N 极和S 极,与交流电机的运转原理相同。图5 所示为二相交流示例。

相邻线圈交流相位差为180°,磁极随交流周期变化进行切换,实现线性驱动。实际上,超导磁悬浮列车为三相交流驱动,相邻线圈的相位差为90°,线圈N、S 极为90°旋转(↑→ ↓←↑)。
交流频率决定列车速度
利用交流电驱动超导磁悬浮列车时,交流频率决定了列车的速度。超导线圈的长度为1.35m,一组线圈的长度是一个周期前进的距离,为2.7m。利用三相交流电时,需要3 个(↑→ ↓)地面线圈,每个线圈长度为0.9cm。如果频率为50Hz,则相位在1s 内反转50 次。而超导线圈一个周期推进2.7m,因此,1min 可前进2.7 × 50 × 60 = 8100(m) = 8.1(km),此时车速为486km/h。实际运行中,会有改变频率调节速度的情况。当行驶速度达到500km/h 时,频率为51.4Hz。
超导磁悬浮列车的电源
普通铁路中,电缆传输的电流通过变电站改变电压和频率后流向接触线,通过受电弓供给火车。图6 所示为超导磁悬浮列车电能传输系统。

电力公司传输的电能先通过变电站,改变原有的电压、电流和频率。再利用逆变器改变交流频率,控制线性速度。
线性电机负责前进
由上文介绍的原理可知,线性电机位于车辆侧与地面设施侧。
线性电机的位置
普通列车的电机属于异步电机中的旋转电机,而线性电机属于线性驱动电机,如图7 所示,

线性电机中的励磁绕组(定子绕组)为线性排列,铺设长度需要与驱动长度(距离)相同,是一个巨大的结构。
车辆侧电机部分较小
车辆侧仅需搭载磁体,电机部分并不在车内。电机控制并不在车辆侧,而是在车辆外,控制车辆外的线路,并且不由车辆驾驶员控制。
1
END
1
往期精彩

200字以内,仅用于支线交流,主线讨论请采用回复功能。