G语言,主动柔顺控制,不解释直接上图,不定期更
主板:Intel Edison for Arduino
电机驱动板:L298P
电机:6V TT电机
外壳:DFRobot履带平台
软件:intel edison setup
LabVIEW
XCTU
Arduino
putty
NIVISA
Java Script(labview 上视频单元找不到了,所以用这个替代)
smartnode
其他相关板子:Arduino Mega
Xbee(早期通讯传输模块,后改用edison板自带WIFI)
IO 传感器扩展板
程序框图
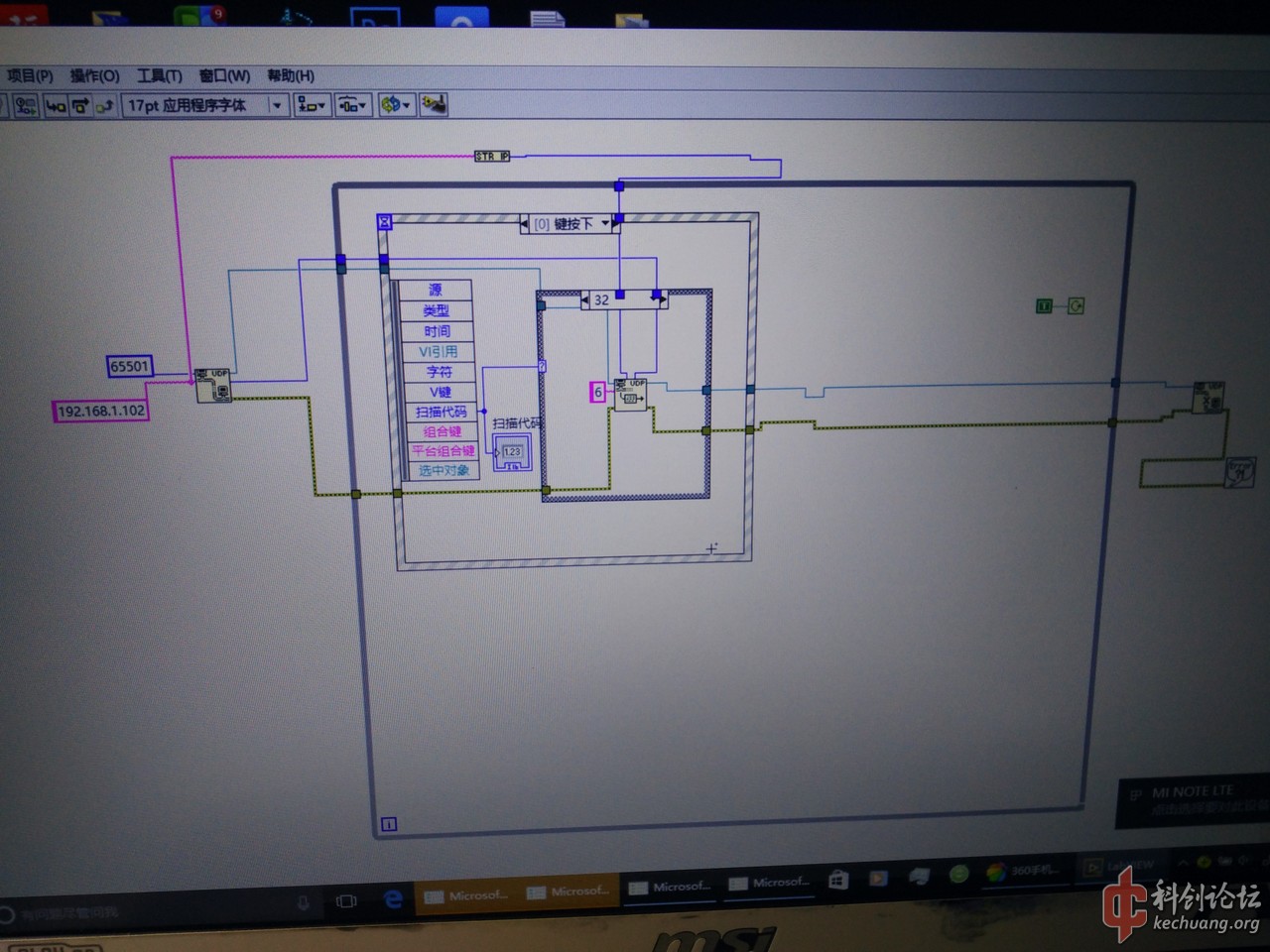
putty通讯设置(视频部分的程序不便开源)

外部整体图
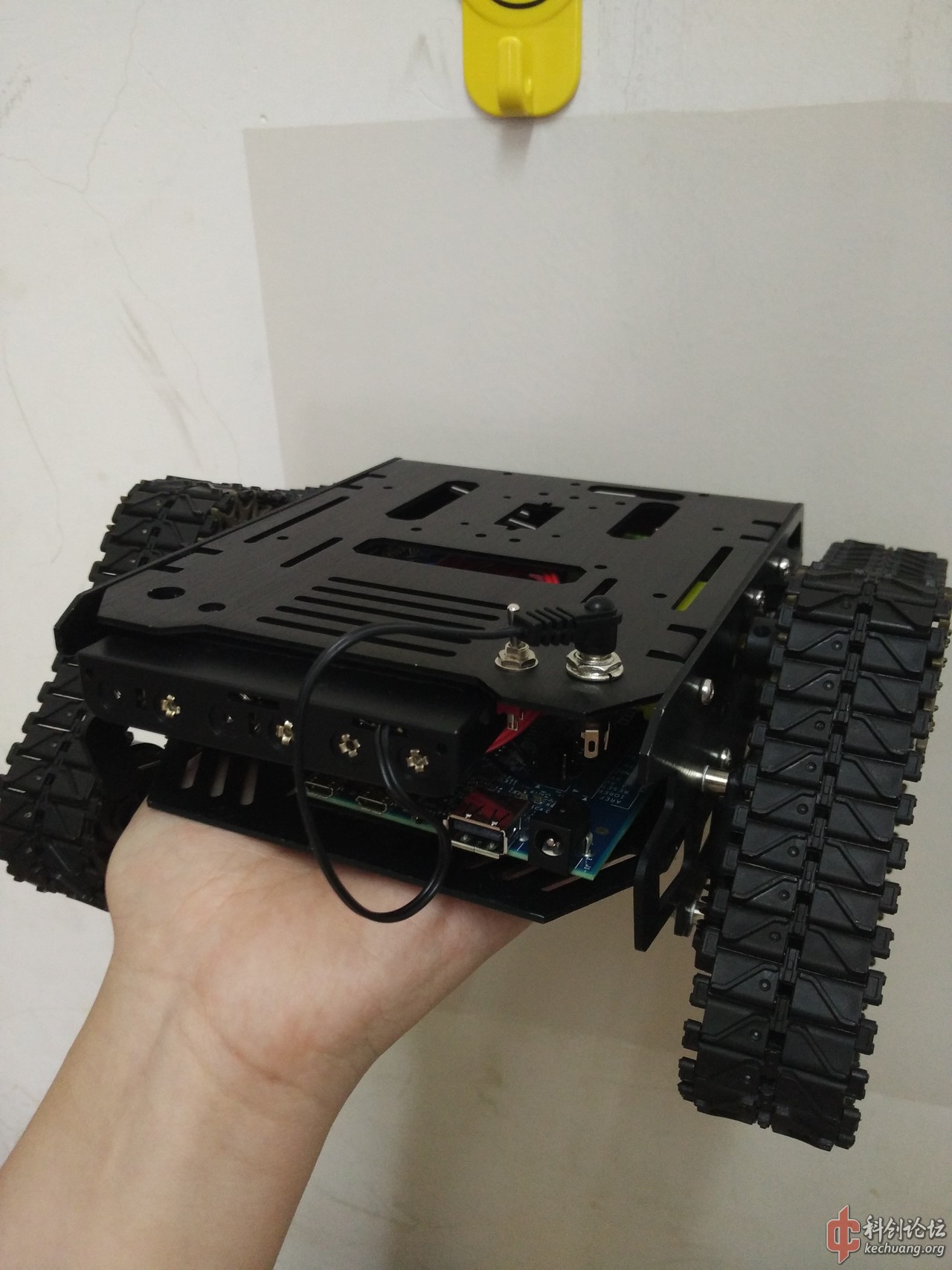





![IMG_20160810_202146.jpg]()
内部图片(忽视我的大白腿)
![IMG_20161013_183427.jpg]()
晒晒我们的实验室(电子实验窗口,PLC等等)
旁边的是我们的留校老师
![IMG_20160924_123901.jpg]()
![IMG_20160924_123922.jpg]()
![IMG_20160924_123901.jpg]()
另外感谢海洋大学诸航,孔祥洪老师的指导,在海洋大学的图片因为涉及到专利,有些与企业商业项目有关等原因不便公开
剩下的smartnode连接图以及其他加装模块如机械臂,电磁弹丸发射装置,各类传感器等会在之后的过程中逐渐完成(加装这些模块要另外设计它们的驱动控制程序,我们需要逐渐摸索)
此外,对我们的外援方超先生的帮助指导致以万分感谢
此贴不定期更新,未完待续









200字以内,仅用于支线交流,主线讨论请采用回复功能。