








我觉得导弹防御就免了。。。。。做一个雷达防半夜查房的老妈和老师最好是可以连接手机用。。不用电脑
加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...

引用第28楼布布卡于2013-08-25 11:26发表的 回 27楼(gurite) 的帖子 :
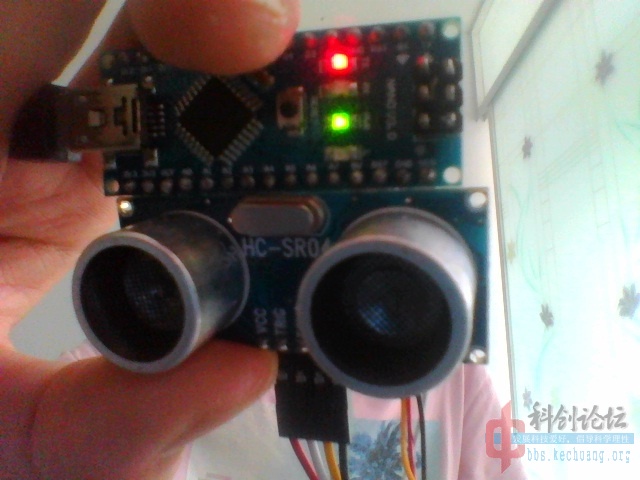
这个看测距模块 并且要在程序中改数值
引用 yurifreeman:5线 4相的···步进·
话说我的步进电机也是5根线的..........
Other// Proje Hocam - Radar Projesi
// Murat DURAN - V2
import processing.serial.*; // kütüphane entegresi
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1166, 500);
smooth();
myPort = new Serial(this,"COM3", 9600); // Com portunu se?in
myPort.bufferUntil('.');
}
void draw() {
fill(98,245,31);
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // ye?il renk
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) {
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(",");
angle= data.substring(0, index1);
distance= data.substring(index1+1, data.length());
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(683,700);
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1300,1300,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,700,700,PI,TWO_PI);
arc(0,0,400,400,PI,TWO_PI);
// draws the angle lines
line(-700,0,700,0);
line(0,0,-700*cos(radians(30)),-700*sin(radians(30)));
line(0,0,-700*cos(radians(60)),-700*sin(radians(60)));
line(0,0,-700*cos(radians(90)),-700*sin(radians(90)));
line(0,0,-700*cos(radians(120)),-700*sin(radians(120)));
line(0,0,-700*cos(radians(150)),-700*sin(radians(150)));
line(-700*cos(radians(30)),0,700,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(683,700);
strokeWeight(9);
stroke(255,10,10); // k?rm?z? renk
pixsDistance = iDistance*22.5;
// 40 cm ye kadar ?l?er
if(iDistance<40){ line(pixsdistance*cos(radians(iangle)),-pixsdistance*sin(radians(iangle)),700*cos(radians(iangle)),-700*sin(radians(iangle))); } popmatrix(); void drawline() { pushmatrix(); strokeweight(9); stroke(30,250,60); translate(683,700); line(0,0,700*cos(radians(iangle)),-700*sin(radians(iangle))); drawtext() if(idistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, 1010, width, 1080);
fill(98,245,31);
textSize(25);
text("10cm",800,690);
text("20cm",950,690);
text("30cm",1100,690);
text("40cm",1250,690);
textSize(40);
text("Object: " + noObject, 240, 1050);
text("Angle: " + iAngle +" °", 1050, 1050);
text("Distance: ", 1380, 1050);
if(iDistance<40) { text(" " + idistance +" cm", 1400, 1050); } textsize(25); fill(98,245,60); translate(390+960*cos(radians(30)),780-960*sin(radians(30))); rotate(-radians(-60)); text("30°",0,0); resetmatrix(); translate(490+960*cos(radians(60)),920-960*sin(radians(60))); rotate(-radians(-30)); text("60°",0,0); translate(630+960*cos(radians(90)),990-960*sin(radians(90))); rotate(radians(0)); text("90°",0,0); translate(760+960*cos(radians(120)),1000-960*sin(radians(120))); rotate(radians(-38)); text("120°",0,0); translate(840+900*cos(radians(150)),920-960*sin(radians(150))); rotate(radians(-60)); text("150°",0,0); popmatrix(); }< code></40)></40){>















200字以内,仅用于支线交流,主线讨论请采用回复功能。