

不错顶一个。如果把超声波模块的导线换成水银滑环的,就不用导线了。就可以无限制的转了。
54197
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22t54197%22%2C%22tid%22%3A%2254197%22%2C%22mainForumsId%22%3A%5B%22163%22%5D%2C%22categoriesId%22%3A%5B%22439%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
自制USB雷达 --- 架设你自己的导弹防御系统
雷达大家都见过(起码电视上见过),每次看到觉得很爽啊,能探测各种障碍物,要是自己能够拥有一个就太棒了。
而有人不光敢想,更敢于将想法付诸实践(这也是我们所缺少的),他真的做出了一个非常酷的USB雷达。
![32_37529_be410a0544c4733.jpg]() [/url]
[/url]
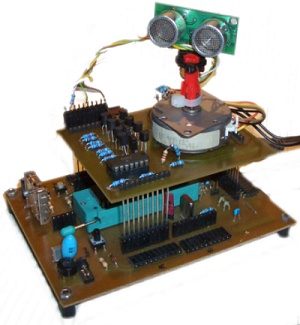
这个就是他的外形,看起来简陋了一点,但是玩起来让人相当high啊。
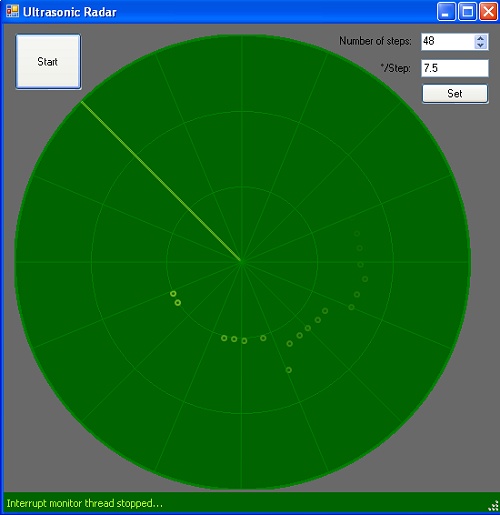
这位国外的爱好者不光做出了这个电路,他还编写了非常漂亮的上位机,实现了用电脑控制的目的。
![32_37529_3c4ace918ca5391.jpg]() [/url]
[/url]
怎么样,看这个界面是不是很像真正的雷达呢?反正我是被这个界面给吸引住了。
那么我们究竟怎样才能拥有一台像作者一样的USB雷达呢?
首先讲讲整体框架,其实这个USB雷达从原理上来讲很简单,就是由一个安装在步进电机上的超声波模块,还有一个PIC单片机,当然不能少了步进电机的驱动电路了。
PIC单片机通过驱动电路驱动步进电机转动,并接受安装在步进电机上的超声波模块发来的回波信号,得出前方障碍物的位置,然后通过USB发送给上微机软件,由上位机软件计算得出每个障碍物的图形化显示。
具体的驱动电路实际也很简单,就是由两个H桥组成。(嫌麻烦的话,个人觉得用L298实现也是可以的)。
而作者不仅仅满足于此,他还从商店中购买了一个USB导弹。
![32_37529_d306afc5accbfef.jpg]() [/url]
[/url]
怎么样,导弹+雷达。。。成爱国者导弹防御系统了。。。。
为了使这两个设备配合得更好,也使这个项目更加好玩,作者修改了一下上位机程序。
![32_37529_9cc4707f08b4b19.png]() [/url]
[/url]
加入了导弹之后,这个项目就更加有意思了。不过操作起来也更复杂了一点。
貌似作者买的这个USB导弹是不带反馈的,就是说它不反馈旋转的角度,那么使用就麻烦了很多,建议大家制作这个的时候,导弹也做成带反馈的,就和雷达的基底一样就ok。
由于不带反馈,我们就没法知道导弹的指向,但是我们可以通过它的速度还有转动的时候求出它的位置(但是这个可能会有误差)。而且在开始时我们需要把导弹的位置调到和雷达的方向相同。
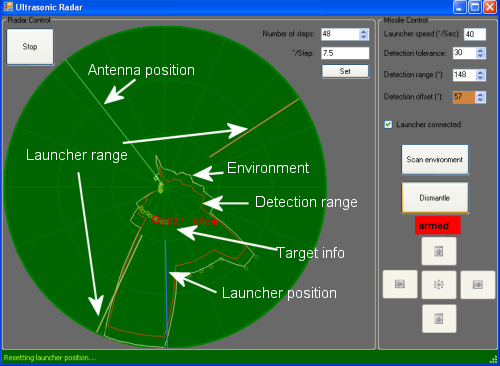
作者这个软件的操作是这样的,首先USB雷达启动,转动360度,点击软件上的Scan environment按键,软件将会在图中画出障碍物的轨迹(想象雷达被一个围墙包围,扫描后,将会显示这个围墙的轨迹),而且由于超声波的散射性等原因,这个轨迹不是精准的,软件会自动进行一个修正,得到最后的侦测范围。
现在,若有一个目标在侦测范围之内(图中红色曲线所包围的区域),软件将会控制导弹转动到最近的目标并攻击它!不幸的是,我们再次失去了导弹的方向,我们只能通过测定导弹转动到目标的时间,和设定的速度得出导弹现在的位置,如果转动过了或者不足,就要修正导弹转动的速度。
注:这个雷达挺有意思的,其实我想的话,下面的那个步进电机是不是可以换成一般的直流电机+减速箱,通过一些简单的反馈,比如说转动时带动某个电位器(其实就是舵机的原理),然后单片机检测电位器上的电压,可以得到电机的位置信息。这样的话,可以省去驱动步进电机,因为步进电机的驱动还是比较麻烦的,而直流电机只需要一个H桥就可以用PWM调速控制。还有就是如果要做导弹的话,最好也做成这种带反馈的。
不知道大家还有没有其他新奇的想法呢?比如做成二维的,就可以得出一个面的曲线,那样应该更有意思(可以扫描一个东西表面的曲线,简单判断它是什么)。
而有人不光敢想,更敢于将想法付诸实践(这也是我们所缺少的),他真的做出了一个非常酷的USB雷达。
 [/url]
[/url]
这个就是他的外形,看起来简陋了一点,但是玩起来让人相当high啊。
这位国外的爱好者不光做出了这个电路,他还编写了非常漂亮的上位机,实现了用电脑控制的目的。
 [/url]
[/url]
怎么样,看这个界面是不是很像真正的雷达呢?反正我是被这个界面给吸引住了。
那么我们究竟怎样才能拥有一台像作者一样的USB雷达呢?
首先讲讲整体框架,其实这个USB雷达从原理上来讲很简单,就是由一个安装在步进电机上的超声波模块,还有一个PIC单片机,当然不能少了步进电机的驱动电路了。
PIC单片机通过驱动电路驱动步进电机转动,并接受安装在步进电机上的超声波模块发来的回波信号,得出前方障碍物的位置,然后通过USB发送给上微机软件,由上位机软件计算得出每个障碍物的图形化显示。
具体的驱动电路实际也很简单,就是由两个H桥组成。(嫌麻烦的话,个人觉得用L298实现也是可以的)。
而作者不仅仅满足于此,他还从商店中购买了一个USB导弹。
 [/url]
[/url]
怎么样,导弹+雷达。。。成爱国者导弹防御系统了。。。。
为了使这两个设备配合得更好,也使这个项目更加好玩,作者修改了一下上位机程序。
 [/url]
[/url]
加入了导弹之后,这个项目就更加有意思了。不过操作起来也更复杂了一点。
貌似作者买的这个USB导弹是不带反馈的,就是说它不反馈旋转的角度,那么使用就麻烦了很多,建议大家制作这个的时候,导弹也做成带反馈的,就和雷达的基底一样就ok。
由于不带反馈,我们就没法知道导弹的指向,但是我们可以通过它的速度还有转动的时候求出它的位置(但是这个可能会有误差)。而且在开始时我们需要把导弹的位置调到和雷达的方向相同。
作者这个软件的操作是这样的,首先USB雷达启动,转动360度,点击软件上的Scan environment按键,软件将会在图中画出障碍物的轨迹(想象雷达被一个围墙包围,扫描后,将会显示这个围墙的轨迹),而且由于超声波的散射性等原因,这个轨迹不是精准的,软件会自动进行一个修正,得到最后的侦测范围。
现在,若有一个目标在侦测范围之内(图中红色曲线所包围的区域),软件将会控制导弹转动到最近的目标并攻击它!不幸的是,我们再次失去了导弹的方向,我们只能通过测定导弹转动到目标的时间,和设定的速度得出导弹现在的位置,如果转动过了或者不足,就要修正导弹转动的速度。
注:这个雷达挺有意思的,其实我想的话,下面的那个步进电机是不是可以换成一般的直流电机+减速箱,通过一些简单的反馈,比如说转动时带动某个电位器(其实就是舵机的原理),然后单片机检测电位器上的电压,可以得到电机的位置信息。这样的话,可以省去驱动步进电机,因为步进电机的驱动还是比较麻烦的,而直流电机只需要一个H桥就可以用PWM调速控制。还有就是如果要做导弹的话,最好也做成这种带反馈的。
不知道大家还有没有其他新奇的想法呢?比如做成二维的,就可以得出一个面的曲线,那样应该更有意思(可以扫描一个东西表面的曲线,简单判断它是什么)。
[修改于 8年8个月前 - 2016/04/09 21:03:21]
加载全文
引用 kknd:自己设计的芯片[s::P]
求器件型号。。。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。


下载的文件要用什么软件打开?
下载的文件要用什么软件打开?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
纯假设,如果做个三坐标联动,再做一个乒乓球发射,全数控。呵呵呵。注意和谐。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

我就想知道这东西能不能发展一下 用来对付屋里的蚊子,,,
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

还有一个,如果把车辆前后左右统统装上这个,然后用软件处理数据下,在车辆显示屏上显示立体影像,也完全可以大卖
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

引用 我说要有光:那是用在CCD上的好吧
推一款光学传感器,叫TCD132D 应该能用来实现更复杂的功能
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

引用 kknd:能奉献一下电路图和源程序嘛??我也想做!
不用USB的我也做了一个。
引用
加载评论中,请稍候...





200字以内,仅用于支线交流,主线讨论请采用回复功能。