
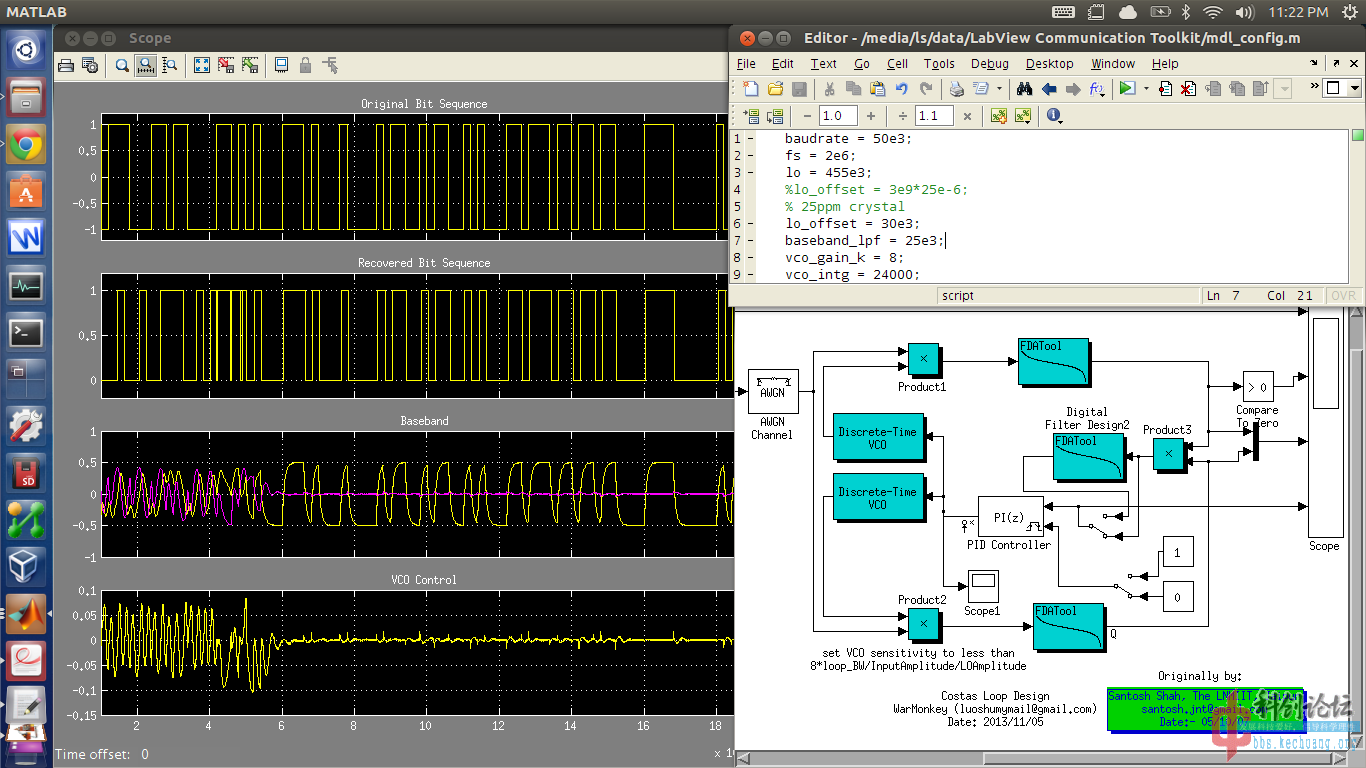



看图貌似环路滤波器没有接入?这样把频率2倍于载波的高频分量输入到PID不会干扰的吗
另外如何判断环路相位已锁定/失锁?
另外如何判断环路相位已锁定/失锁?
nhlijiaming 发表于 2013-11-9 17:14
看图貌似环路滤波器没有接入?这样把频率2倍于载波的高频分量输入到PID不会干扰的吗
另外如何判断环路相 ...
以上内容仅实现了载波同步,对于解调PAM信号(BPSK、QPSK、8PSK、16QAM等)是远远不够的。
发射机基带会使用成型滤波器,需要相应的使用匹配滤波器,以实现最佳基带传输。简单的低通滤波的冲激响应不满足要求,严重影响灵敏度:
对于基带波形为方波的(Rectangular),此时可以不滤波,使用积分清除器。在一个码元的时间内累积,此为AWGN信道条件下对符号的最大似然估计;
对于邻道有干扰的情况,需要使用升余弦(RC)滤波器,以抑制带外干扰并实现最佳基带传输。符号的估计值,应该是滤波器输出在码元中心时刻的瞬间采样值;
基带发送方使用了根升余弦(RRC)滤波器,接收使用同样的滤波器,实现匹配滤波。其余同b。
实际信号码速率不是精确的也不是固定的,码元起始时刻不定,需要恢复码元时钟才能实现准确的累积/采样:
不管是积分清除,还是在码元中心时刻采样滤波器输出,都需要准确恢复码元时钟。需要使用mueller-muller或者gardner算法测定采样时刻误差,闭环反馈到任意速率重采样模块,使得采样时刻正确对齐并能够动态跟踪;
如果发射机码时钟和载波时钟从同一个参考振荡器产生,可以使用载波频移来辅助估计码速率;
也可以用专门的同步信号或者导频信号实现码同步、载波同步,例如GSM的FCCH信号(正弦波),或者是伪随机码作为数据包头。
闭环控制使用的控制器类型以及参数选取:
二阶PLL使用比例-积分(PI)控制器产生频率控制信号,这对于一般的接收机是够用的;
此时可以通过环路带宽设定,阻尼系数设定(一般是1/sqrt(2)约为0.707),计算出PI控制器的参数;
如果需要对高动态目标进行跟踪,需要考虑引入FLL、三阶PLL、FLL+PLL,或者外部速度位置信息输入。
参考阅读:
| 时段 | 个数 |
|---|---|
| {{f.startingTime}}点 - {{f.endTime}}点 | {{f.fileCount}} |

200字以内,仅用于支线交流,主线讨论请采用回复功能。