
修改于2024.1.31,增加了购买链接以及飞控模块的分解功能图
89854
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22928718%22%2C%22tid%22%3A%2289854%22%2C%22mainForumsId%22%3A%5B%22165%22%2C%2289%22%5D%2C%22categoriesId%22%3A%5B%5D%2C%22tcId%22%3A%5B6%2C12%5D%7D
%7B%22isEditMode%22%3Afalse%7D
所有教程由网友发布,仅供参考,请谨慎采纳。科创不对教程的科学性、准确性、可靠性负责。
基于航模技术的探空火箭姿态自稳定装置
蒲松岩张世杰
关键词
姿态控制航模火箭
这是目前微型探空火箭中实现姿态修正的最低成本与最低难度的方法,但是要求更高的还是要自己去编程序了。
意义:
在探空火箭研究过程中,我研究团队发现了如果火箭设计有误差,发动机摆放不正确,以及有侧风等等容易影响火箭飞行的问题,为此,我们查阅了众多航天器资料,最终发现,在三轴航天器中经常用到与航模遥控系统并联控制航模姿态的飞行自稳定系统,通过对航模飞行姿态的微调,使航模更加容易操控。我们推测,若能在探空火箭中运用此类系统,可以大大提高火箭飞行过程中的稳定性,减少使用时发生意外事故的可能性。
2姿态自稳定思路
在固定翼航模中,经常会使用到飞行自稳模块,这种模块装配在固定翼航模上能够使固定翼航模飞行过程中自动对航模的飞行姿态进行检测并且自动通过舵机对航模的飞翼和襟翼控制,进行飞行过程中航模的姿态自动稳定。于是我们设想是否能够将固定翼航模飞控自稳模块装配在探空火箭上面,通过对火箭鸭翼进行控制,实现探空火箭飞行的姿态自稳定。
模块详细接口介绍:
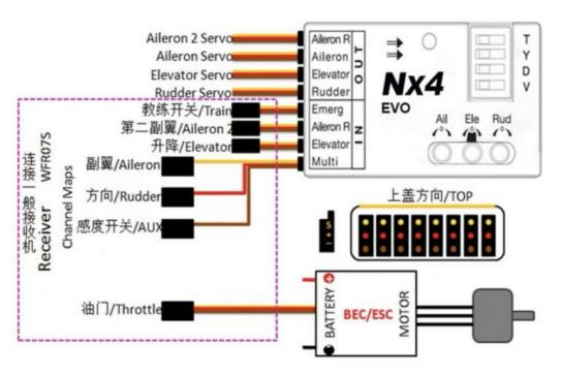
链接电路图:

模块安装在火箭中前部,驱动舵机进而控制鸭翼转角实现姿态控制。前部安装可以使火箭在高速飞行过程中偏离中心时能够快速实现姿态回转,能够有效提高火箭飞行稳定性并避开尾部发动机所带来的高温,震动等干扰。
2.2优点
2.2.1成本低。
2.2.2实现简单。不需要修改模块本身,通过连接舵机以及改装连接电路和控制电路,实现基于成熟的航模技术的低成本姿态控制。
2.2.4提高火箭的飞行安全性和任务成功率。
3姿态自稳定模块装载与调试


通过检测火箭飞行的角度和角速度参数,采用PID控制算法计算并输出控制火箭鸭翼转角,保持鸭翼垂直,从而修正火箭姿态。传统航模通常采用三轴姿态控制,但在探空火箭中,姿态控制无需考虑竖直方向,于是我们使用两个舵机,分别控制火箭对侧鸭翼同轴旋转,仿照航模姿态稳定系统原理,修正火箭偏角。
装载原理与固定翼航模一致,直接参考B站视频,装载过程较长,这里不做赘述。
c267df90c84409a41d0a0f11f3ddb123_raw.mp4 点击下载
火箭发射测试
37064da3bebd2c7b5a904dc979ab4e42.mp4 点击下载
有点作用,火箭姿态在刚开始时就有倾斜,但是后面迅速回正
购买链接:
NX4飞控模块

电调

遥控器与接收机

具体的安装教程直接上B站搜索NX4飞控即可找到三角翼的安装教程。
[修改于 10个月25天前 - 2024/01/31 21:39:49]

那个是尾翼不是鸭翼。如果有鸭翼很容易静不稳定,靠这个飞控恐怕搞不定。
引用
1
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
那个是尾翼不是鸭翼。如果有鸭翼很容易静不稳定,靠这个飞控恐怕搞不定。
我们也试了一下,这个飞控是辅助稳定,什么意思呢?也就是有两个轴,x轴和y轴,x轴是始终会保持控制的翼面与水平垂直,y轴翼面则会在偏离大约1秒后恢复直与箭体平行的方向。简单来说就是有一边机翼会回摆,怎么解决呢?装两个上去就好了,但是毕竟是低成本的简单实现,要求高的就得自己去写代码,我们也现在在做第二代的单片机飞控。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

引用
1
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
引用
3
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

固定翼航模飞控+30A电调(外挂)+***^0x3f+
这是目前微型探空火箭中实现姿态修正的最低成本与最低难度的方法
y轴翼面则会在偏离大约1秒后恢复直与箭体平行的方向。简单来说就是有一边机翼会回摆,怎么解决呢?装两个上去就好了
=


全文未提及有关火箭基本信息和翼面计算过程
两个字:刺激
听说lz要打省赛。。。
引用粥粥:“希望比赛不会埋没人才”
当年搞飞控的时候从普通测角度(气动仿真打表)一路搞到图像识别,做的第一套飞控(带位移积分,包括电池、舵机,没有无线电)的成本还没这一块固定翼飞控的价格高。
建议lz多看书
引用
1
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
🙃固定翼航模飞控+30A电调(外挂)+***^0x3f+这是目前微型探空火箭中实现姿态修正的最低成...
我也说了,适合无基础的,难道做哪些不需要基础吗?我说过了省赛是自己设计的飞控,麻烦看完再给出所谓的建议
引用
1
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

🙃固定翼航模飞控+30A电调(外挂)+***^0x3f+这是目前微型探空火箭中实现姿态修正的最低成...
不好说,万一人家lz有cyber大脑和“我的眼睛就是尺!”,人家一睁眼就能扫描出来火箭气动外形和各表面粗糙系数,并且初步得出飞行器巡航速度,再一闭眼马上就能心算拟合出表示箭体周围流场的函数,迭代几次找到“全局最优解”,然后用手按照正负0.02丝的精度把铝材冷塑成所需形状,这不就简简单单完成了。事成之后,配享KC太庙,成为火箭版座上宾,那有多风光我都不敢想。
人家眼睛眨几下、手动几下抵你努力辛苦几个月。你呀,图羊图森颇

引用
1
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

想问一下作者的拉杆是怎么和尾翼链接起来的🤔
好吧我回复的有点问题,如图3,通过金属杆将舵机拉杆与控制鸭翼的并联轴(小木棒)上面的舵机杆连接,舵机转动就带动了鸭翼轴转动,最终实现错位式的舵机传动
引用
1
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

支持!该贴具有开创新意义,思路不错。
本质上就是利用开源厂家的pid控制算法,穿越机与航模都可以通用,还可以使用电脑连接地面站调整pid曲线,免去了算法学习的重要步骤,例如batefly地面站调试网站,最近入坑穿越机突然发觉的。
引用
2
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

CIT天行科技
 进士 机友 笔友
进士 机友 笔友
新版本公告
10个月25天前
增加了购买链接以及模块的详细内容
200字以内,仅用于支线交流,主线讨论请采用回复功能。