
为什么我用一个LORA模块GPS信号和陀螺仪信号杂糅到一块去了呢
加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
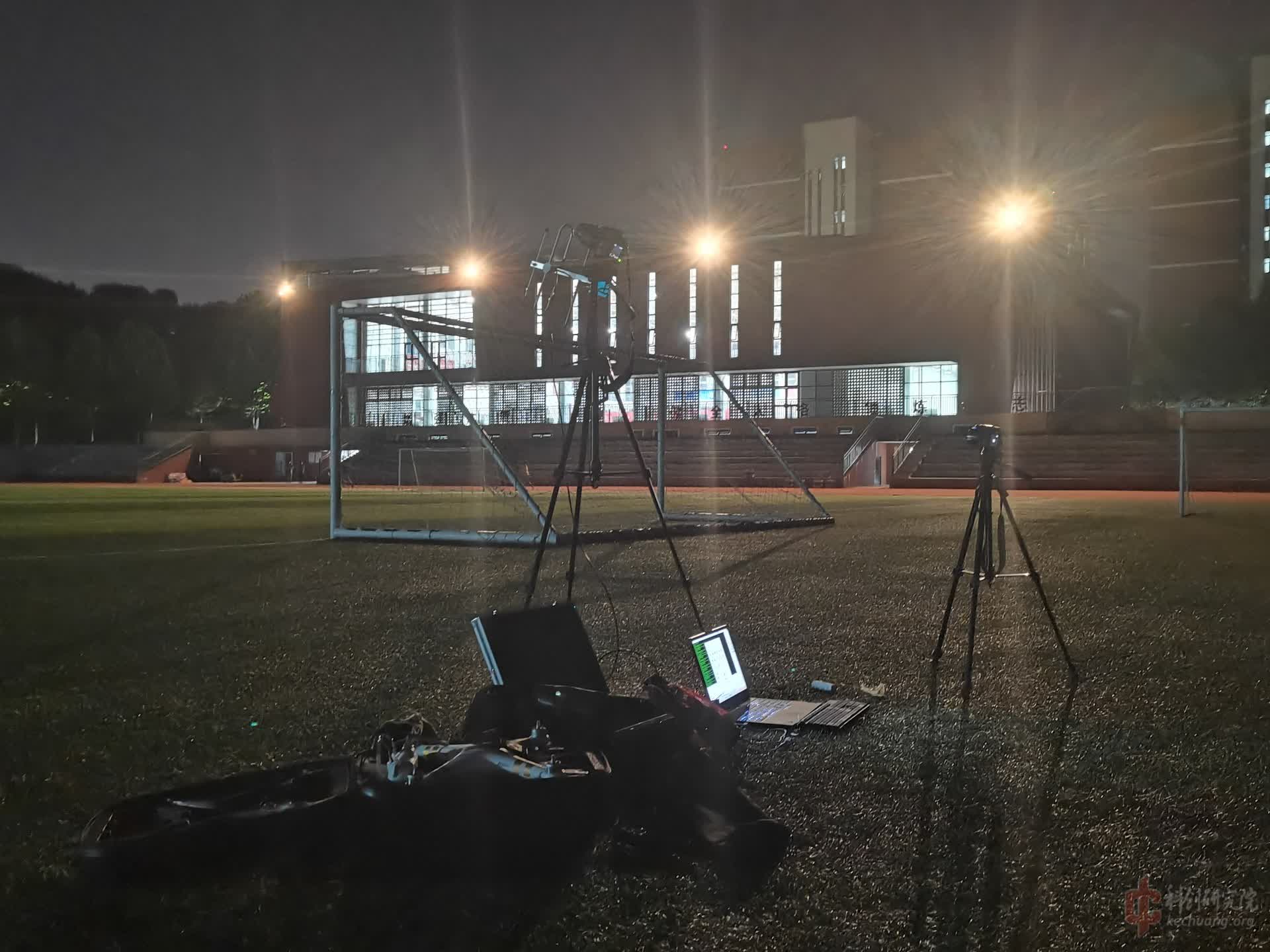
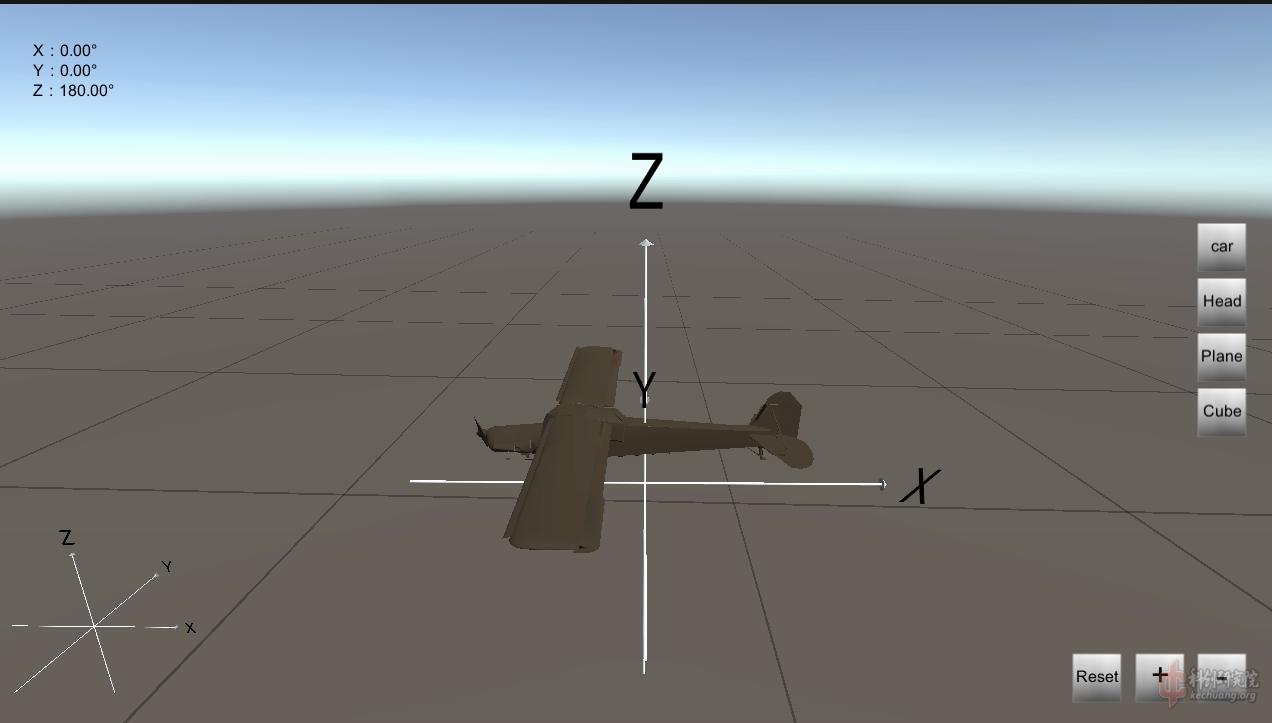
本实验能够简单实现火箭飞行过程中的姿态可视化及定位,定位模块应用的正点原子的北斗GPS模块ATK-1218-BD,陀螺仪使用的维特智能十轴jy-901B,可同时监视高度,姿态,俯仰、滚翻等各种姿态;不足之处是陀螺仪数据采集率太低,可能需要烧固件更改波特率,还需继续改进.......如有不合理的地方,还请各位大神赐教!
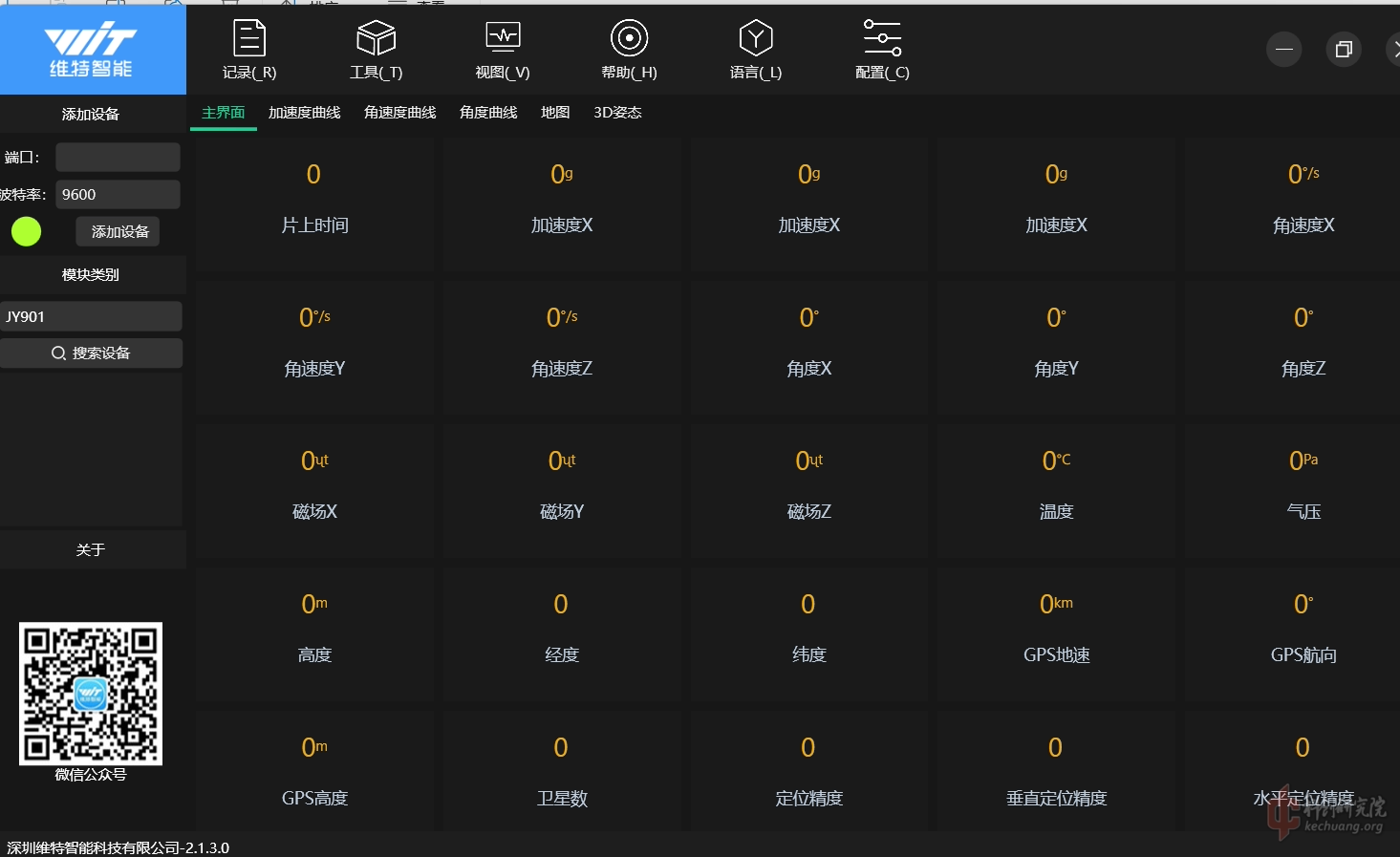
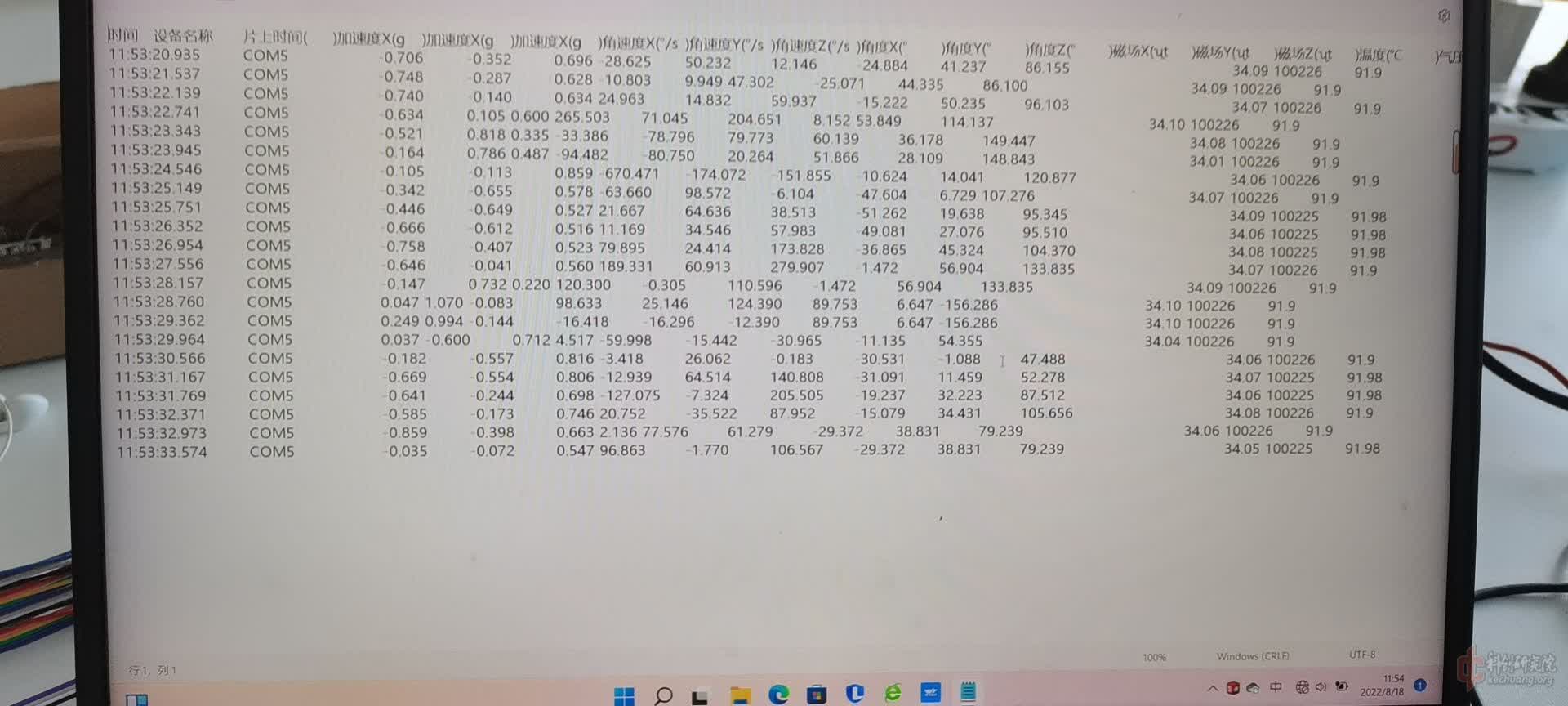
维特智能的上位机中自带数据记录,上电后点击开始记录,完成后结束记录保存,文件会以文本形式保存,保存的信息包括可以检测到的所有姿态数据...
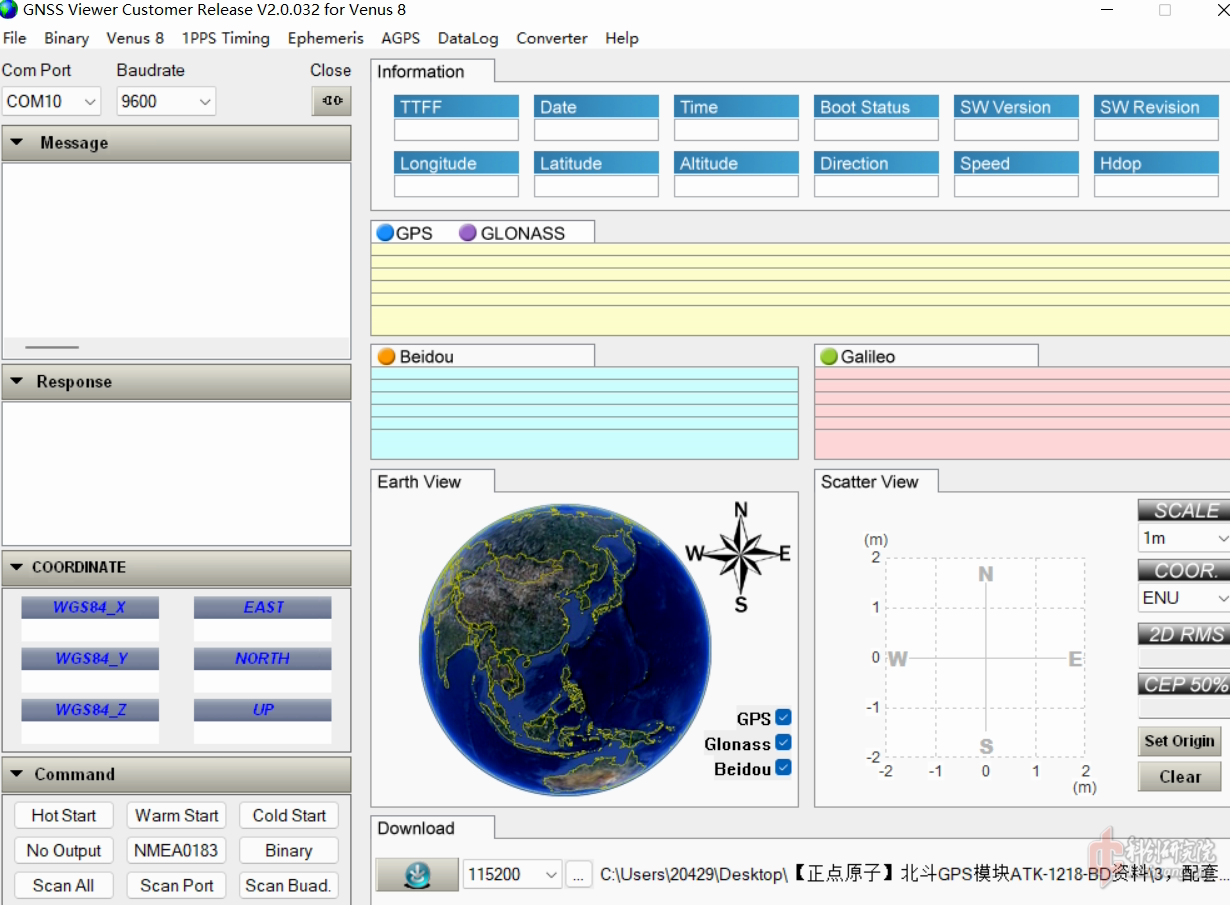
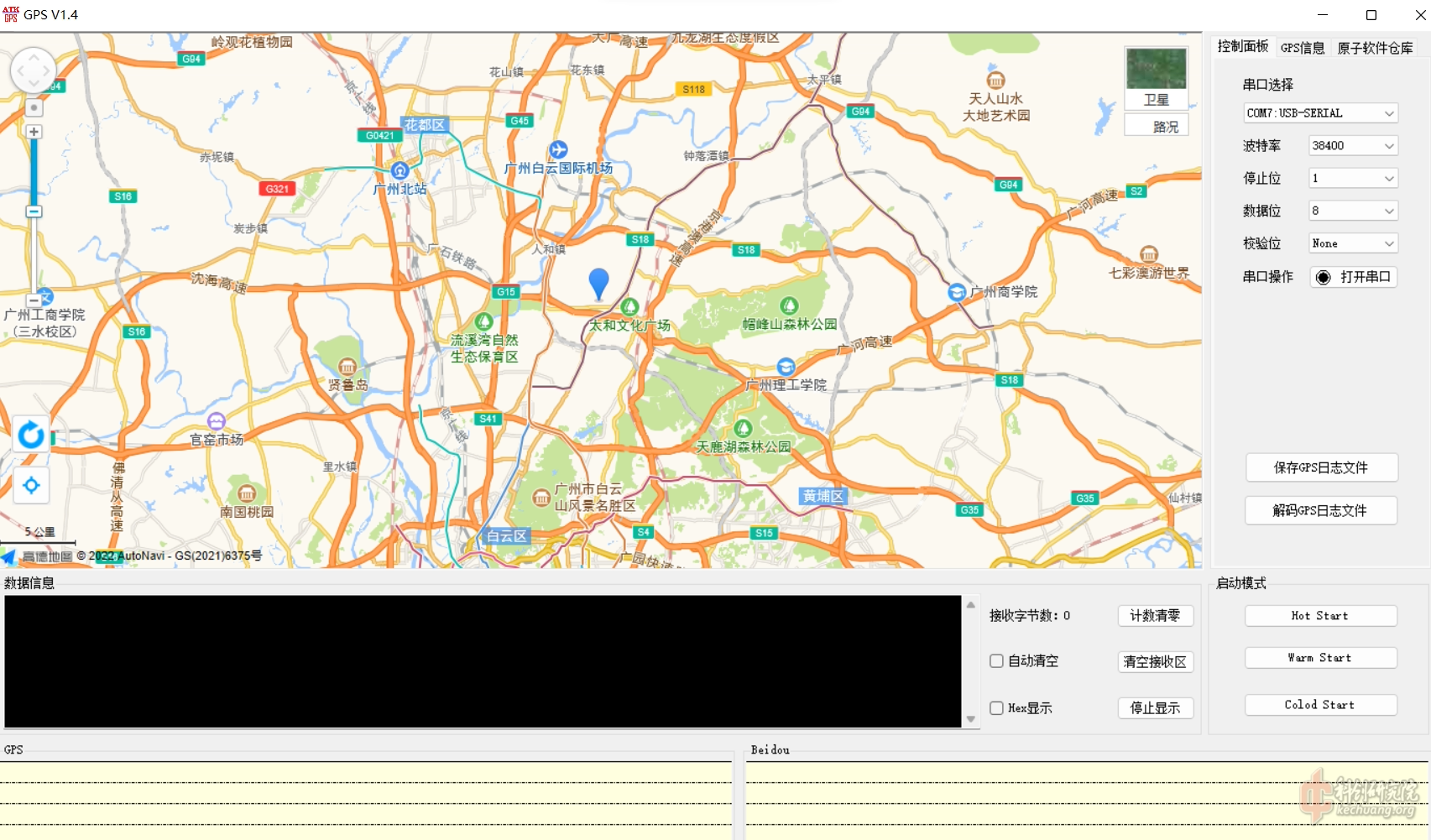
GNSS模块是上电后自己记录,最后点击保存日志文件,即可以把数据保存成文本文件以便于导入MATLAB等软件中进行数据处理。

GPS北斗模块采用的是NMEA-0183协议,采用ASCII码传递GPS定位信息,只需要采用HC-模组将数据传到空中,搭建地面接收端接收就可以了,为了更好的收波效果,我接入了一支6DBL的八木的天线给接收端提高接收信号的质量。



00:0000:00
VID_20220823_084345.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。
00:0000:00
VID_20220823_084325.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。
00:0000:00
VID_20220821_200029(1).mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。
00:0000:00
VID_20220823_095739.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。
由于应用了两个LORA模块作为发射端,一个用于发送GPS信号,一个用于发射姿态信号,所以使用透传会使得数据杂糅在一起,因此在LORA模组要对通信频道进行设置,将透明传输模式转变为点对点传输,分别设置两个不同的频道,这样发射时除非别人也用了相同的通信频道,否则是不可能对通信信号造成干扰的。

用无人机简单进行收波测试,由于操场上没有网络,因此没有地图界面,也没有对GPS飞行轨迹做出出处理,数据传回间隔大概一秒钟定位有10次,可以更改固件提高采样率。
00:0000:00
QQ视频20220826175915.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。


200字以内,仅用于支线交流,主线讨论请采用回复功能。