在完成上一个以简单电学电路为基础的避障机器人项目后,我们将进行第三个PVC机器人项目制作。这是一个比较特殊的机器人,首先其控制电路比上一个项目稍微复杂了一点,是以电子元器件组成的;其次这个机器人不再以传统电池作为电源,而是采用了绿色环保的太阳能作为能源;另外,这个项目的动力驱动方式比较特别——以震动的方式进行挪动位移。

这是一个的以太阳能为能源的特殊移动机器人,即以太阳能电池为电源,以偏心摆锤马达的震动效果作为挪动的动力。
以下为效果视频,前一段是在灯光(白炽灯)下进行测试的效果,后面一段为在阳光下的效果。
因为体型相象,以及震动时的嗡嗡声,我给本项目的太阳能动力机器人再起一个外号——晒太阳的蚊子,呵呵。
一、基本原理 本项目的太阳能机器人采用太阳能电池作为电源,依靠带偏心摆锤的震动马达发出的震动波进行移动。
1、驱动原理 本项目机器人的动力来自于震动马达,这和我们的0号机器人的驱动原理是一样的。
这里所谓震动马达,其实就是我们手机中实现震机的震动器,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
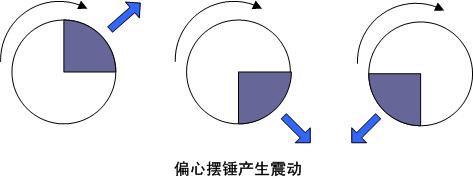
下图中左边的两个震动马达是在普通马达上接了偏心摆锤,而右边扁平的其实把马达和摆锤融为一体了,效果其实相当于左边马达竖着放而已,只不过结构更紧凑了。
2、机械结构 本项目机器人的结构最开始在设计的时候是采用“三点支撑”的方式,即:一对前脚,然后尾部(电子元件:电解电容)着地。
![结构_原来的.jpg]()
后来在实际测试的时候,发现由于尾部着地点较远,导致重心比较靠中心,从而整体平衡较稳定,在震动的时候挪动的幅度不够。后来的设计改为再增加两只后腿,既可以采用三种支撑方式:
1)“四点支撑”:四脚匍匐,较稳定,移动幅度小;
2)“三点支撑”:后脚站立,较稳定,移动幅度较大;
3)“一点支撑”:尾部独立着地,很不稳定,移动幅度最大。
在上面的视频中也演示了这三种不同的情况。
也就是加了两只后腿,看起来就像蚊子了,本机器人“蚊子”的外号也因此而得名。
在重量一定的情况下,越是不稳定的结构,在震动的影响下移动的幅度越大。不过由于震动采用的器件是带摆锤的马达,在震动的过程中会有一个旋转的趋势,如果采用不稳定的支撑结构时,容易发生原地转动。
要改变这个情况,则可以:
调整震动马达的安装方位 如果把震动马达从现在平行身体(一字型)的方向改为垂直身体(十字型)的方向安装,则旋转的趋势就会变成向前或者向后的动力,震动时机器人就会由“打转”变为“向前”或“向后”移动。
如果要改变前进或者是后退,则只要改变马达的电源正负极,即改变马达是顺时针还是逆时针旋转;如果震动马达的摆锤位置不是正好位于机器人身体的中心轴,则还会有略微的转动,但这样动起来的效果更好,还带一点转弯。
![结构_震动马达的安装改造.jpg]()
另外,这里提一下,如果改用扁平震动器,则不可避免的一定会出现以上所说的打转的状况,因为扁平震动器其实相当于上面那种震动马达以转轴垂直地面的竖着放的情况,而扁平震动器由于形状所限又不能随意调整安装方位(只能扁平的水平贴在物件的表面),即无法像上面所说情况那样通过改变方位去化解转动的趋势。当然,如果专门追求转动的效果那又是另外的一种思路。
3、电路原理 本项目的电路比起上一个项目的简单电学电路来说复杂了一些,除了特殊的太阳能电池、震动马达之外,还有几个包括电阻、电容、二极管、三级管等在内的电子元件。
![电路图.gif]()
这是一个典型的太阳能脉动充放电控制电路,通过这个电路可以把太阳能电池收集的电能转为马达转动的动能。
可能有朋友会问:
为什么不用太阳能电池直接接到马达上,而却要搞那么复杂的电路?
确实,是可以把太阳能电池直接接到马达上,但一般太阳能电池的功率都比较小,输出的电流都比较小,无法直接驱动稍微大一些的马达;另外太阳能电池的转换效率都不高,即便使用功率大的太阳能电池和小马达,也只能在太阳直射且太阳光比较强烈的情况下才能正常运转。而采用当前的太阳能脉动充放电控制电路,可以实现“长时间充电蓄能,瞬间大电流放电”,则可以通过采用小功率太阳能电池,在太阳光不是很足的情况下,也能驱动较大的马达转动。
对于熟悉电子电路的朋友,看了这个电路图一定觉得很简单。如果没有接触过电子电路的朋友也没有关系,接下来我会仔细进行讲解,有兴趣的朋友可以听我慢慢说来,如果是已经了解的朋友请直接跳过下面的一段。当然,可能也有一些朋友说“电路原理我就不深究了,反正我会照着电路图组装就行”——这当然也是可以的(以前我自己在初学无线电的时候就是这样的^_^)。
原理分析 接下来我们对本项目的电路进行原理分析,有兴趣深入了解的朋友可以继续跟着来,如果已经很熟悉的可以跳过本节。
本项目机器人的电路实际上是一个比较巧妙的电路——脉动充放电控制电路,其可以把功率较低且有可能断断续续的太阳能电能收集起来集中存储,当存储的电能达到一定量的时候,通过瞬间短暂的放电以获取足够的电流去驱动马达。虽然瞬间放电的电流足够大能够驱动马达,但是持续时间很短,在积蓄的电能很快耗尽后,则马达停止电路重新开始收集太阳能进入下一次循环。
即是这样一个过程:
太阳能充电——>积累电能——>瞬间放电——>驱动马达——>耗尽电能——>太阳能充电…… 由以上看出,本项目的机器人运动的频率是有一个间断性的,即周期性一阵阵的挪动,阳光亮度越大,每个周期中间的间隔时间就越小,相当于挪动得更快。
如果是原来没有电子基础的朋友,可能对前面常规方式的电路原理分析还是听得一头雾水,没有关系,下面我们将以通俗易懂的类比方式再进行一次分析。已经了解的朋友可以忽略跳过继续浏览后面的内容。
在之前介绍电子元件是都会类比到某一种容易明白的工具设备,其实那不仅仅是有助于了解电子元件,同时也是为下面用类比方式介绍电路原理做一个铺垫。
主要的流程如下:
1)下雨天气,“雨水收集器”收集雨水
2)收集到的雨水注入“蓄水池”
3)“蓄水池”蓄满水后会溢出,一次性倒出
4)水流顺着管道流向“阀门”和“水闸”
5)“阀门”和“水闸”关闭,水流无法继续向前流
6)水压升高,水流顶开“阀门”并通过“阀门”,水流到达“闸门1”的基极
7)水压升高,“闸门1”被顶开,水流从“闸门1”的发射极流向集电极
8)“闸门1”集电极流出的水流向“闸门2”的基极
9)水压升高,“闸门2”被顶开,水流从“闸门2”的发射极流向集电极
10)“闸门2”集电极流出的水流向“水车”,并且通过“水流减小器”流回“水闸1”的基极
11)“水车”在水流的冲击下转动,并消耗水流;水流经过“水流减小器”流回“水闸1”的基极
12)“水闸2”集电极流出的水经过“水流减小器”回流到“水闸1”的基极,确保“水闸1”继续打开,循环之下“水闸2”也能保持打开
13)“水车”转动继续消耗水流
14)当“水车”转动消耗大多数水流,“水闸1”和“水闸2”无法维持打开状态,全都关闭了
15)“水车”失去水流驱动,停止了转动
16)准备重新收集雨水,开始下一轮循环
以下为原理分析的模拟动画,希望能够有助于理解。
题外话
[align=left] 如果了解过本项目电路的朋友,可能会知道
该电路原型建议采用的是闪光LED二极管(也称爆闪LED二极管),即点亮后会自动以一定频率自动闪光的发光二极管(其之所以会闪光,其实是嵌入了一块用于控制闪光的芯片)。之所以使用这种类型的二极管,实际上就是因为只要LED二极管瞬间导通一次就可以令整个电路触发正常运行(之后发光二极管不需要继续导通),而且因为只是瞬间发光,所以LED二极管消耗的电能比较小,让剩余的所有电能都能够用在电路的电机运行上。
[u]本项目这里不使用这种闪光LED二极管,而是采用普通发光的LED二极管[/b],主要是因为:[/align]
1)虽然说闪光LED比一般LED省电,但是一般闪光LED的导通电压比较,通常都高于3V,如果要采用这种闪光LED二极管,则我们整体电路的太阳能电池板就不能使用3V的,而是需要更换为3V以上甚至4V的,再加上本身闪光LED二极管也比普通LED二极管价格高,这样的话无形中增加了成本。
2)虽然理论上使用普通LED二极管的效率不如使用闪光LED二极管,但是经过我们实践,以我们目前项目的电路元件的参数,我们的机器人还是可以运行得比较顺畅的,一来是我们所采用的电机都是低能耗的,能够在比较低的电流下正常运行;二来我们采用的太阳能电池板的电流也比较高,能够提供较大的电流。所以即便是我们采用普通LED二极管多消耗了一些电能,但是还是不影响机器人的整体运行的。
[/b][/b][/b][/b][/b][/b]
















200字以内,仅用于支线交流,主线讨论请采用回复功能。