


69309
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22t69309%22%2C%22tid%22%3A%2269309%22%2C%22mainForumsId%22%3A%5B%22175%22%5D%2C%22categoriesId%22%3A%5B%220%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
自制示波器,带dds,频谱计算功能。
前段时间闲着自制了一个示波器。
基于ucos+ARMcortexM4+FPGA。
带FIR,FFT,Kalman算法。
最高采样率50M。存储8K*2字节数据。每秒64次波形(VGA刷屏63次/秒,快了也显示不出)
fpga:数据采集,DDS波形产生,提供VGA时序驱动屏幕。
ARMcortexM4:外设接口控制,数据处理,跑RTOS调度。
FPGA与CPU通过8位并行总线通信。CPU给FPGA内置RAM写 命令/数据
……后来想弄成虚拟的,下位机USB发数据,上位机用C#做数据处理,波形绘制。没时间弄,最近天天加班。
刚来科创的时候我才大二,现在都毕业半年了。
PS:我不会画板
先上张图
![251959227623414.jpg]()
基于ucos+ARMcortexM4+FPGA。
带FIR,FFT,Kalman算法。
最高采样率50M。存储8K*2字节数据。每秒64次波形(VGA刷屏63次/秒,快了也显示不出)
fpga:数据采集,DDS波形产生,提供VGA时序驱动屏幕。
ARMcortexM4:外设接口控制,数据处理,跑RTOS调度。
FPGA与CPU通过8位并行总线通信。CPU给FPGA内置RAM写 命令/数据
……后来想弄成虚拟的,下位机USB发数据,上位机用C#做数据处理,波形绘制。没时间弄,最近天天加班。
刚来科创的时候我才大二,现在都毕业半年了。
PS:我不会画板
先上张图

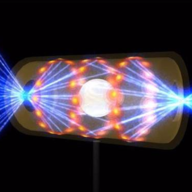
频谱显示功能演示(FFT)对着数字信号处理教材自己写的,用递归和非递归两种方式实现,和MATLAB对照确认计算无误。
![3.jpg]()

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
高通滤波器与低通滤波器功能演示(理想FIR滤波器+汉明窗)单独开任务计算FIR参数。每输入一次计算一次参数。
![4.jpg]()
![5.jpg]()
![6.jpg]()
![m1.jpg]()
![m2.jpg]()
![m3.jpg]()






引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
卡尔曼滤波算法(kalman算法对于随机噪声为最优),一维卡尔曼算法,无转置矩阵。
![11.jpg]()
![12.jpg]()
![13.png]()



引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
#include <app.h>
#include "ucos_ii.h" //uC/OS-II系统函数头文件
#include "sysinit.h" //系统配置
#include "task_header.h" //任务相关宏 结构体
#include "fpga_data.h" //与FPGA通信部分
#include "bsp.h" //ARM驱动
#include "character.h" //字模
#include "dds_data.h" //dds数据
#include "mcu_math.h" //数学算法部分
//#include "arm_math.h"
/********临时定义变量******************/void system_init_task(void *pdata)
{
//double cc;
pdata = pdata;
#if OS_CRITICAL_METHOD == 3 //关中断的方法为3
OS_CPU_SR cpu_sr;
#endif
OS_ENTER_CRITICAL();
OS_CPU_SysTickInit(CPU_frequency/1000); //初始化OS节拍无比重要
port_init(); //设置所有IO为低电平&&输出
//UART4_Init(115200);
init_LED();
key_init(); //将四个IO配备成中断
lcd_data_init(); //lcd 数据传输
PIT0_Init(CPU_frequency/64); //pit定时中断,VGA刷屏速率约为63次/秒
//PIT0_Init(5000000);
//初始化四个电位器AD
AD_init();
OS_EXIT_CRITICAL();
//计算sin相关参数,尼玛不要手动输入。
read_data_init();
LED1(0);
LED2(0);
LED3(0);
LED4(0);
//状态
trigger.state =0;
kalman.state = 0;
fft_wave.state =0;
freq_selc.state =0;
dds.state = 0;
trigger_lock.state =0;
//默认值
trigger.value =0;
kalman.value = 0;
fft_wave.value =0;
freq_selc.value =0;
dds.value = 0;
trigger_lock.value =0;
//光标
trigger.cursor =0;
kalman.cursor = 0;
fft_wave.cursor =0;
freq_selc.cursor =0;
dds.cursor = 0;
trigger_lock.cursor =0;
//双向循环链表
fft_wave.next_menu = &trigger;
trigger.last_menu = &fft_wave;
fft_wave.value_num = 2;
fft_wave.menu_num =1;
trigger.next_menu = &kalman;
kalman.last_menu = &trigger;
trigger.value_num = 3;//上升 下降 双向
trigger.menu_num =2;
kalman.next_menu = &freq_selc;
freq_selc.last_menu = &kalman;
kalman.value_num =2;
kalman.menu_num =3;
freq_selc.next_menu = &trigger_lock;
trigger_lock.last_menu = &freq_selc;
freq_selc.value_num = 3;//开启,关闭,确认输入
freq_selc.menu_num =4;
trigger_lock.next_menu = &dds;
dds.last_menu = &trigger_lock;
trigger_lock.value_num = 2;//锁定,解锁
trigger_lock.menu_num =5;
dds.next_menu = &fft_wave;
fft_wave.last_menu = &dds;
dds.value_num = 4;//方波,正弦,合成波(滤波演示),干扰波(卡尔曼演示)
dds.menu_num =6;
menu_p = &fft_wave;
menu_head = &fft_wave;
//key事件标志
KeyFlag = OSFlagCreate(0,&err);
Menu = OSFlagCreate(0,&err);
Data_Process = OSFlagCreate(0,&err);
//menu信号量,保护全局变量
MenuSem = OSSemCreate(1);
FirParamSem = OSSemCreate(1);
//这里换成互斥信号量,避免优先级反转标记一下。
//LCDdataSem = OSSemCreate(1);
LCDdataSem = OSMutexCreate(Mutex_prio,&err);
//发送参数的邮箱
ParaMbox = OSMboxCreate((void*)0);
FirMbox = OSMboxCreate((void*)0);
OSFlagPost(Menu,(OS_FLAGS)0x01,OS_FLAG_SET,NULL);
/*临时测试add与clk信号是否能用*/
OSTimeDly(5);
OSTaskDel(Init_task_prio);
}
void key_task(void *pdata)
{
pdata = pdata;
while(1)
{
//等待置1
OSFlagPend(KeyFlag,(OS_FLAGS)0x0f,OS_FLAG_WAIT_SET_OR,0,&err);
OSTimeDly(40);
if(!((GPIOD_PDIR>>8)&0x01)) //确认键
{
led_2 = !led_2;
while(!((GPIOD_PDIR>>8)&0x01))
OSTimeDly(1);
OSTimeDly(40);
LED2(led_2);
key_menu(1);
OSFlagPost(KeyFlag,(OS_FLAGS)0x01,OS_FLAG_CLR,NULL);
OSFlagPost(Menu,(OS_FLAGS)0x01,OS_FLAG_SET,NULL);
OSFlagPost(FirFlag,(OS_FLAGS)0x01,OS_FLAG_SET,NULL);
}
else if(!((GPIOD_PDIR>>10)&0x01)) //退出键
{
led_2 = !led_2;
while(!((GPIOD_PDIR>>10)&0x01))
OSTimeDly(1);
OSTimeDly(40);
LED2(led_2);
key_menu(2);
OSFlagPost(KeyFlag,(OS_FLAGS)0x02,OS_FLAG_CLR,NULL);
OSFlagPost(Menu,(OS_FLAGS)0x02,OS_FLAG_SET,NULL);
}
else if(!((GPIOD_PDIR>>12)&0x01)) //左
{
led_2 = !led_2;
while(!((GPIOD_PDIR>>12)&0x01))
OSTimeDly(1);
OSTimeDly(20);
LED2(led_2);
key_menu(3);
OSFlagPost(KeyFlag,(OS_FLAGS)0x04,OS_FLAG_CLR,NULL);
OSFlagPost(Menu,(OS_FLAGS)0x04,OS_FLAG_SET,NULL);
}
else if(!((GPIOD_PDIR>>14)&0x01)) //右
{
led_2 = !led_2;
while(!((GPIOD_PDIR>>14)&0x01))
OSTimeDly(1);
OSTimeDly(20);
LED2(led_2);
key_menu(4);
OSFlagPost(KeyFlag,(OS_FLAGS)0x08,OS_FLAG_CLR,NULL);
OSFlagPost(Menu,(OS_FLAGS)0x08,OS_FLAG_SET,NULL);
}
else
OSFlagPost(KeyFlag,(OS_FLAGS)0x0f,OS_FLAG_CLR,NULL);//清按键数据
}
}
void uart4_task(void *pdata)
{
pdata = pdata;
while(1)
{
/* LED1(0);
Uart4_SendByte(97);
OSTimeDly(100);
LED1(1);
OSTimeDly(100);*/
}
}
void menu_task(void * pdata)
{
//uint8 data;
#if OS_CRITICAL_METHOD == 3 //关中断的方法为3
OS_CPU_SR cpu_sr;
#endif
pdata = pdata;
//cpu_sr = cpu_sr;
while(1)
{
OSFlagPend(Menu,(OS_FLAGS)0x0f,OS_FLAG_WAIT_SET_OR+OS_FLAG_CONSUME,0,&err); //所有按键皆触发该事件
//OSSemPend(LCDdataSem,0,&err);
OSMutexPend(LCDdataSem,0,&err);
show_menu();
//OSSemPost(LCDdataSem);
OSMutexPost(LCDdataSem);
OSFlagPost(Menu,(OS_FLAGS)0x01,OS_FLAG_CLR,NULL);
}
}
void data_process_task(void * pdata)
{
#if OS_CRITICAL_METHOD == 3 //关中断的方法为3
OS_CPU_SR cpu_sr;
#endif
uint16 i,j,trigger_add,add;
uint8 data;
int8 tem;
uint8 wave_data[(LcdLength+FirLength-1)];
uint16 ReadLength;
struct complex_num fft_result[FFT_CNT];
uint8 fft_out[FFT_CNT];
int32 FirTem;
//uint8 wocao[4] = {0x01,0x04,0x02,0x03};
//uint8 sample_para,voltage_para,phase_para,show_para;
uint8 Para[4]; //sample show phase vlotage
//uint8 show_num,;
pdata = pdata;
while(1)
{
OSFlagPend(Data_Process,(OS_FLAGS)0x01,OS_FLAG_WAIT_SET_AND+OS_FLAG_CONSUME,0,&err);
//cc = arm_sin_f32(1.6);
if(!trigger_lock.value) //如果触发
{
//获取AD信号,分频
Para[0] = ADC_Getdata(sample_ctrl);
Para[0] = sample_algorithms(Para[0]);
debug2 = Para[0];
Set_fre_div(Para[0]);//1为2分频,2为四分频……
//开始采集
read_start(1);
//寻找触发源
trigger_add = trigger_seek();
}
else
{
}
Para[1] = (ADC_Getdata(show_ctrl)>>4)+1;
debug = Para[1];
Para[2] = ADC_Getdata(phase_ctrl);
Para[2] =(Para[2]>>2)<<2; debug1="Para[2];" osmboxpost(parambox,¶[0]); phase_para="0;" debug="phase_para;" 发送消息 add="trigger_add+Para[2]*Para[1];" 读取更多数据以完成fir滤波 if(freq_selc.value) readlength="(LcdLength+FirLength-1);" else for(i="0;i<ReadLength;i++)" { os_enter_critical(); add +="Para[1];" wave_data = read_data(add);
//OS_EXIT_CRITICAL();
}
read_start(0);
if(freq_selc.value==2)
{
for(i=0;i<lcdlength;i++) { firtem="0;" for(j="0;j<FirLength;j++)" firtem +="wave_data[i+j]*FirParam[j];" wave_data=FirTem>>10;
}
}
else if(freq_selc.value==1)
{
for(i=0;i<lcdlength;i++) { firtem="0;" for(j="0;j<FirLength;j++)" firtem +="wave_data[i+j]*FirParam[j];" wave_data=(FirTem>>10)-100;
}
}
else;
if(kalman.value)
KalmanFilter(&wave_data[0],KalmanInitX,KalmanInitP);
else;
if(fft_wave.value==1)
{
OS_ENTER_CRITICAL();
fft(&wave_data[0],&fft_result[0],FFT_LEN,FFT_CNT);
absfft(&fft_result[0],&fft_out[0],FFT_CNT);
OS_EXIT_CRITICAL();
//cc[0] = fft_out[0];
//cc[1] = fft_out[1];
//cc[2] = fft_out[2];
//cc[3] = fft_out[3];
OSMutexPend(LCDdataSem,0,&err);
//命令切换
data = (menu_p->state)?(0x80+clr_data_cnt):clr_data_cnt;
write_command(data);
//写波形数据
data = (menu_p->state)?(0x80+write_data_command):write_data_command;
write_command(data);
for(i=0;i<(fft_cnt);i++) { tem="(fft_out[i+1]-fft_out<i">)/3;
write_data(fft_out);
write_data((fft_out+tem));
write_data((fft_out+tem+tem));
}
for(i=0;i<96;i++) { write_data(0x00); } osmutexpost(lcddatasem); } else { osmutexpend(lcddatasem,0,&err); 命令切换 data="(menu_p-">state)?(0x80+clr_data_cnt):clr_data_cnt;
write_command(data);
//写波形数据
data = (menu_p->state)?(0x80+write_data_command):write_data_command;
write_command(data);
for(i=0;i<480;i++) { write_data(wave_data);
}
OSMutexPost(LCDdataSem);
}
OSFlagPost(Data_Process,(OS_FLAGS)0x01,OS_FLAG_CLR,NULL);
}
}
void dds_ctrl_task(void *pdata)
{
pdata = pdata;
while(1)
{
OSFlagPend(Menu,(OS_FLAGS)0x01,OS_FLAG_WAIT_SET_AND+OS_FLAG_CONSUME,0,&err); //确认键触发该事件
//OSFlagPend(Menu,(OS_FLAGS)0x01,OS_FLAG_WAIT_SET_AND,0,&err); //尝试清除/不清除标志
if((menu_p ==&dds)&&(!menu_p->state)) //在DDS选项下按了确认 并且状态非下拉
{
OSMutexPend(LCDdataSem,0,&err);
dds_data(dds.value);
OSMutexPost(LCDdataSem);
}
else
{
//OSFlagPost(Menu,(OS_FLAGS)0x01,OS_FLAG_CLR,NULL);
//标志不清除,留给menu事件用。
}
}
}
void FirPara_task(void *pdata)
{
pdata = pdata;
uint8 * ReceivePara;
uint32 FirFre;
while(1)
{
OSFlagPend(Menu,(OS_FLAGS)0x01,OS_FLAG_WAIT_SET_AND+OS_FLAG_CONSUME,0,&err); //确认键触发该事件
if((menu_p ==&freq_selc)&&(!menu_p->state))
//计算fir参数
{
ReceivePara = OSMboxPend(ParaMbox,0,&err);
if(freq_selc.value==1)
{
FirFre = ReceivePara[1]*3*(ReceivePara[0]-1)/25;
FirPara(255,FirFre,DataLength,&FirParam[0],FirLength);
}
else if(freq_selc.value==2)
{
FirFre = ReceivePara[1]*12*(ReceivePara[0]-1)/25;
FirPara(FirFre,0,DataLength,&FirParam[0],FirLength);
}
else;
}
OSTimeDly(10);
}
//参数计算 参数 采样频率 分频 DDS频率
//FirPara(uint8 H,uint8 L, uint16 N,float * fir_c,FirLength)
}
void Paradata_task(void *pdata)
{
uint8 * ReceivePara;
pdata =pdata;
while(1)
{
ReceivePara = OSMboxPend(ParaMbox,0,&err);
OSMutexPend(LCDdataSem,0,&err);
show_para(ReceivePara);
OSMutexPost(LCDdataSem);
OSTimeDly(3);
}
}
复制代码</480;i++)></96;i++)></(fft_cnt);i++)></lcdlength;i++)></lcdlength;i++)></2;></app.h>
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。




你好,看到你的工作我很感兴趣,最近我在想示波器改装成电化学工作站的可能性。只可惜我不是学这个的。如果你感兴趣,请联系我。我可以进一步跟你介绍这一块的市场。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
电化学工作站的功能主要是能测电流随电压的变化,电流值一般在十的负五安培左右。要求检测限要低。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。


引用 路人乙:这个得赞
频谱显示功能演示(FFT)对着数字信号处理教材自己写的,用递归和非递归两种方式实现,和MATLAB对照确认计算无误。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
引用 路人乙:做得不错
高通滤波器与低通滤波器功能演示(理想FIR滤波器+汉明窗)单独开任务计算FIR参数。每输入一次计算一次参数。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

引用 wzg1199:10-5安就是0.01毫安,并不难,不是示波器的事情,是模拟设计的事。
电化学工作站的功能主要是能测电流随电压的变化,电流值一般在十的负五安培左右。要求检测限要低。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
楼主不会画板子是好事,以后大把人帮你画板子,程序写好就行了。
滤波器参数可以送进FPGA,让FPGA实时滤波,节省ARM上的资源。
嵌入式水平不错,拍照水平尚需提高。
这个水平的设计人员还要天天加班,无良企业。建议投简历到科创仪表局
滤波器参数可以送进FPGA,让FPGA实时滤波,节省ARM上的资源。
嵌入式水平不错,拍照水平尚需提高。
这个水平的设计人员还要天天加班,无良企业。建议投简历到科创仪表局
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
引用 潜伏:商用示波器很多不过8位AD而已。
不错 精度如何?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
引用 novakon:还在上学就表好为人师了。(我毕业半年)
楼主不会画板子是好事,以后大把人帮你画板子,程序写好就行了。
滤波器参数可以送进FPGA,让FPGA实时滤波,节省ARM上的资源。
嵌入式水平不错,拍照水平尚需提高。
这个水平的设计人员还要天天加班,无良企业。建议投简历到科创仪表局
我自己水平我自己心里有数(上次面试就被虐了)
主要因为在校生普遍比较水,上学的时候还拿过电赛国奖,出来还不是被虐……
最后弱弱的问下 所谓仪表局待遇几何?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
你好,你对示波器有研究?微型的专业电化学工作站很有市场。价格十几万。
引用 novakon:
10-5安就是0.01毫安,并不难,不是示波器的事情,是模拟设计的事。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
引用 路人乙:我没有为您人师的意思,只是发言习惯。我画板子画得还可以,我写码也不一定就比你少嘛。
还在上学就表好为人师了。(我毕业半年)
我自己水平我自己心里有数(上次面试就被虐了)
主要因为在校生普遍比较水,上学的时候还拿过电赛国奖,出来还不是被虐……
最后弱弱的问下 所谓仪表局待遇几何?
而且我是学电气工程的,不是学电子的,我们的课里面没有FPGA也没有ARM,为不了你的师。。。
科创仪表局目前是搞无线电测试设备的,之前曾经贴过启事,待遇肯定不是最好的,但是氛围很好。具体有劳您私信一下仪表局局长“虎哥”。
拍照水平确实有待提高,这个是大实话,不过既然大家都看得出来,我觉得提也是多余。那就不好意思,请当我没说吧
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
撸主面试时被虐只能说面试官不识才。我干过很多面试工作,知道很多负责面试的人水平也就那个工匠样而已。他们唯一擅长的,就是用自己干了好多年很熟悉的非常窄的专业知识来难为面试者。
我要是面试,会收你。
从你干的这个看来,你的基础知识和思考能力都不错。而且在电子工程师类别里还属于相当不错的那类。
我要是面试,会收你。
从你干的这个看来,你的基础知识和思考能力都不错。而且在电子工程师类别里还属于相当不错的那类。
引用
加载评论中,请稍候...

200字以内,仅用于支线交流,主线讨论请采用回复功能。