
不好意思..分类选错了
加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
首先附一张N年前失败的作品 这也是梦开始的地方
效果也就是从塑料管滑出来的程度..

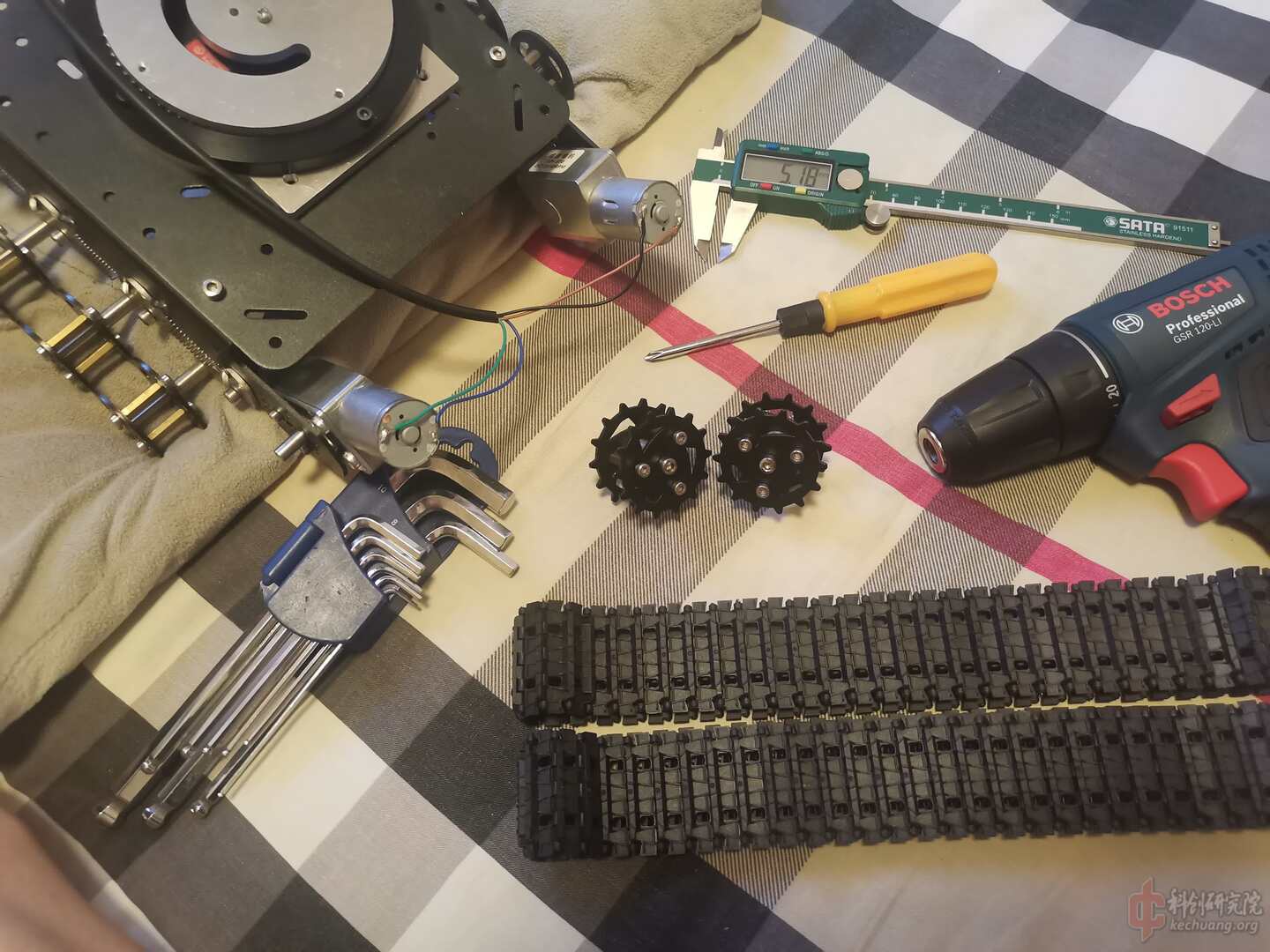
近期看着闲置的履带底盘和元件又有了些想法
然后来简述一下设计思路:整体通过两个遥控器实现无线控制 遥控器一控制底盘的行进方向、炮塔的旋转和炮管的俯仰角
遥控器二控制炮塔装填、充电和发射
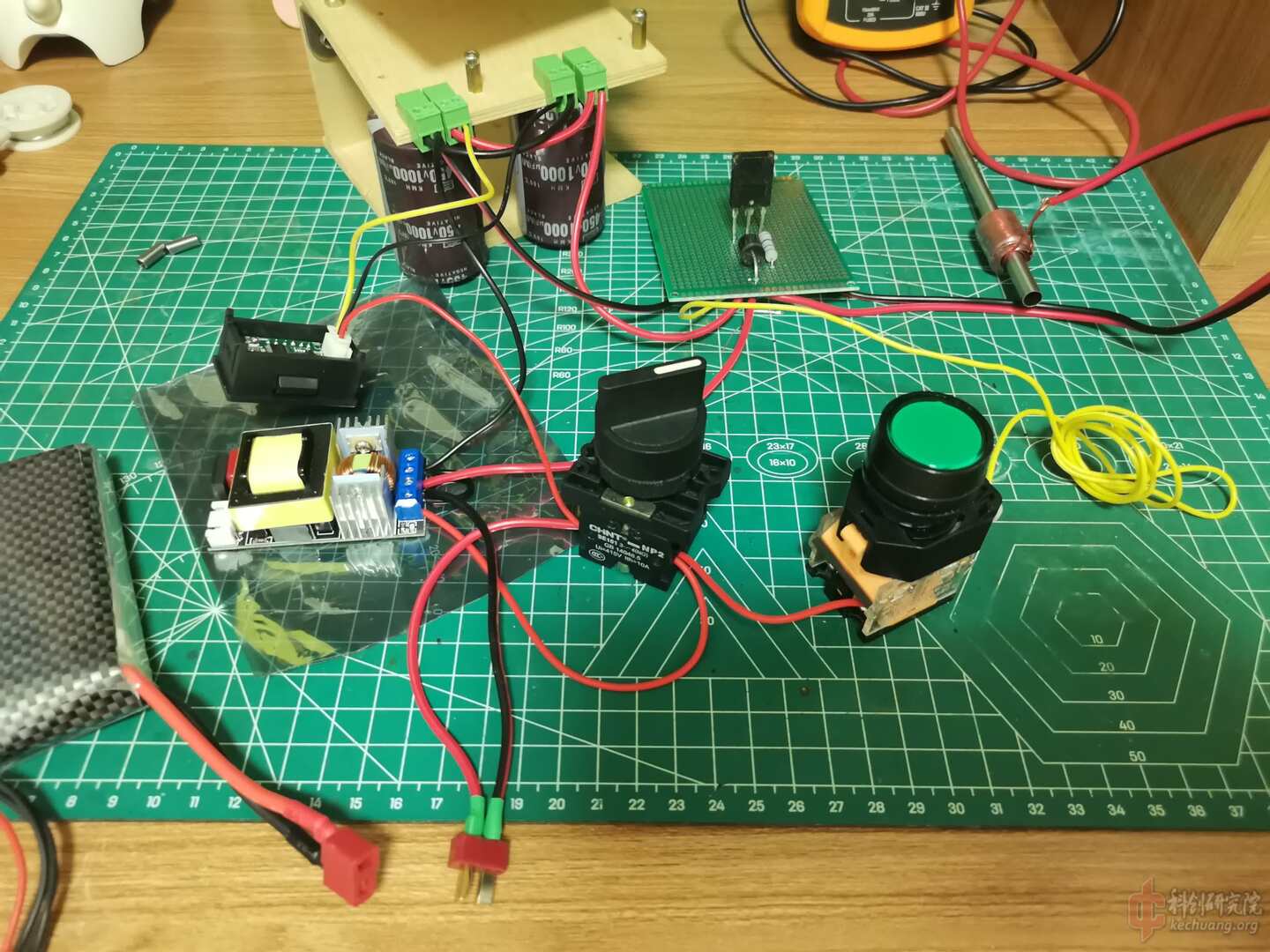
以下是测试电路的连接图:属于单级线圈炮 3S暴力电池供电附BB响以防过放 数显电压表显示电容当前电压
以下是正式电路连接图:由三个模块和两个电容组成 三个模块分别为:zvs、发射模块和四路继电器
此图是确定了各模块与木方安装板上的位置 整个木方安装板为核心

以下是本人设计的装填块:内部方孔安装电磁铁 位于前端的小孔内部安放钕磁铁安装内六角螺钉以定位弹丸和发射管位置 上方槽孔是弹丸装填口 容量五发 后端连接15KG舵机 控制俯仰角
装填块材质为黑色ABS 3D打印技术FDM
弹丸规格:5*30mm
![新建文件夹M5W9}B$YY@_QZ2O8YBZ]9CB.png](https://img.kechuang.org:81/r/342963?c=resource)
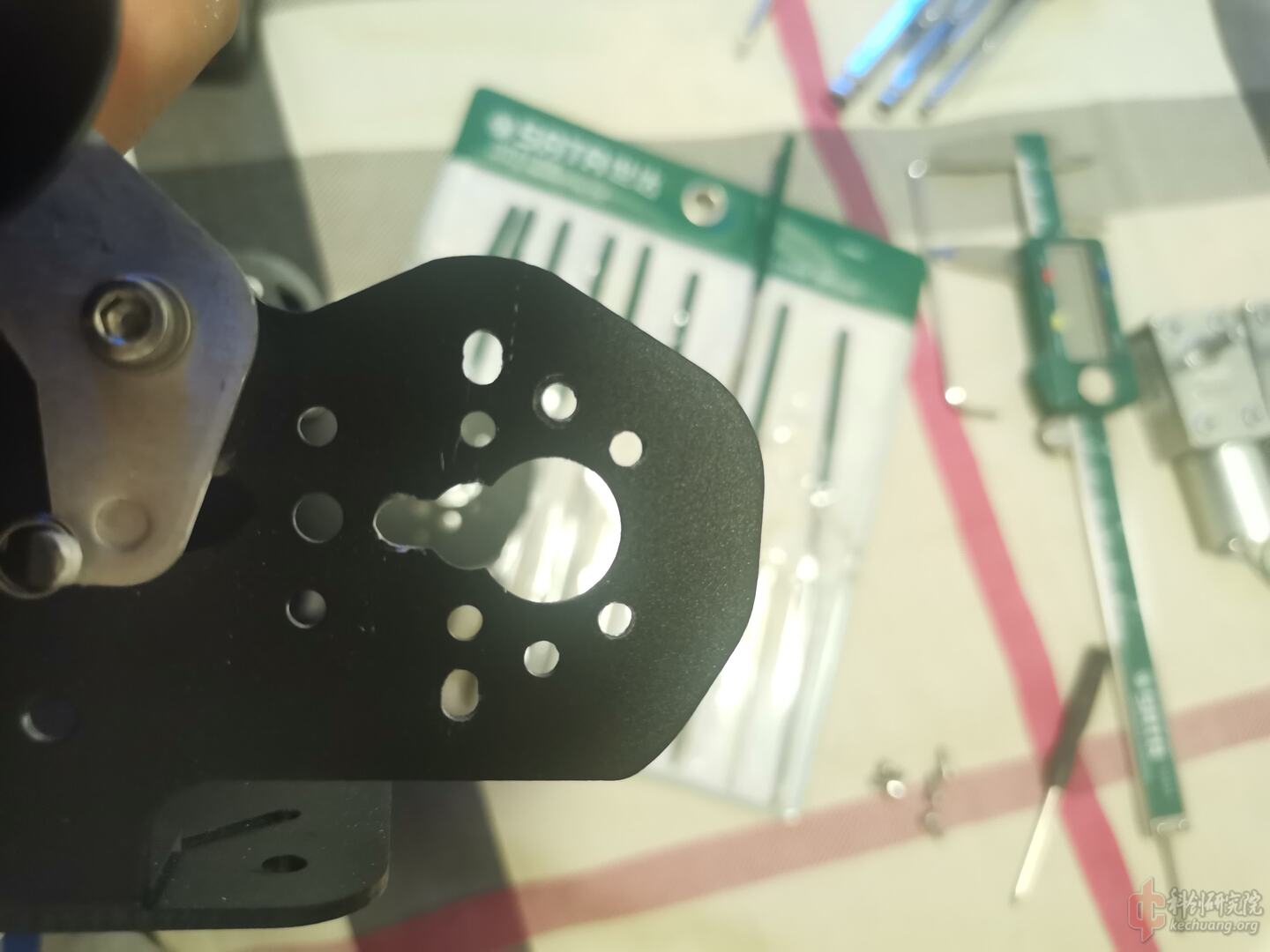
以下是本人设计的旋转炮台部分:可以近似360旋转吧 黑色部件是转轴 购买的成品 由于我的底盘年代久远 与现在的底盘和安装件的孔位是完全不通用的..所以上下板是要重新设计加工的 这里要吐槽一下:过去设计是完全不考虑舵机的舵盘不是在中心位 所以你把底盘上的舵机安装孔开在正中间有啥用啊..
旋转炮台整体材质为铝合金 CNC
![新建文件夹7J29B0MBLS4V%FF11]7$_A7.png](https://img.kechuang.org:81/r/342964?c=resource)
附一张炮塔内部的整体布局:调试各部分工作正常
测试电压:100V 达成测试效果

接下来的制作过程就在本帖更新喽 大家请多指教~
想问一下,履带悬挂是类克里斯蒂还是扭杆或板簧,涡簧?履带动力控制结构是仿真还是电调?
想问一下,履带悬挂是类克里斯蒂还是扭杆或板簧,涡簧?履带动力控制结构是仿真还是电调?
想问一下,履带悬挂是类克里斯蒂还是扭杆或板簧,涡簧?履带动力控制结构是仿真还是电调?
应该是克里斯蒂悬挂吧 主动轮用的370电机 定速的 差速转向 我今天回去安装旋转炮台会拍底盘的图片
楼主这个炮管和填装装置表达的不是很清楚可以详细讲讲吗?
对于俯仰装置不建议这样设计(可以去看看二战到冷战时期的坦克设计 如豹1 T-62之类的)
微调精度差
角度保持强度可能不足(开火后)
当然了如果要求不高可以忽略这些
如果有条件,可以仿一个瞄准装置用图传加屏幕或眼镜操作,同时把遥控做大到等身(过分点加个颠簸模拟椅),这样就真的很像是在真开坦克了
对了关于坦克履带返回辊,我是不建议加的,要是自带了也无所谓了
这玩意主要作用是:
一,减小履带和负荷轮(载荷轮)的摩擦,在总体上摩擦降低一些,但在模型上可以忽略
二,用来挂冗长的履带在如 空载时负荷轮支臂角度(同坦克底板的)较大,悬挂行程长(收缩的距离),坦克较重且悬挂回弹力大(注意 阻尼指的是压缩难度)的设计 之中,例如美国的M1坦克
另外
双扭杆黑豹坦克(因为不得不使用劣质钢做扭杆的神奇产物 二战中悬挂行程最长的的坦克)没有坦克返回辊可能是因为为侧面箱型装甲的限制(都快输了哪还在乎这点小优化?)
楼主这个炮管和填装装置表达的不是很清楚可以详细讲讲吗?对于俯仰装置不建议这样设计(可以去看看二战到冷...
1、用电磁铁定位弹丸到钕磁铁位置 磁力强弱通过两个内六角螺钉调
2、之前想用偏心轮连杆做来着 但空间不够 就直接用舵机了
3、会安装摄像头 给遥控手柄安装手机支架 摄像头影像传输给手机
一小段底盘系统遥控调试 和我设计的旋转炮台完美匹配 ANO和锂电为了调试暂时放一下
00:0000:00
VID_20230608_202045.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。
最近有点懒 还没开始设计外壳 发一段核心调试视频吧 工作流程更直观
00:0000:00
VID_20230610_215735.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。
n年前入的坑,现在止步于穿一层易拉罐,n多个1000uf450v并联
引用2323639940发表于16楼的内容n年前入的坑,现在止步于穿一层易拉罐,n多个1000uf450v并联
能正常工作就挺好
换了俩无刷行星齿轮直流减速电机 现在用的有刷工作时冒火星子 很讨厌 不喜欢

一手拽着 一手拿遥控 这还刚扣到油门启动点 带着外壳子加内部配件10斤多健步如飞❗️ 轮子上的螺丝甩掉好几颗 9000mah的3S锂电+120A电调 额定扭矩13牛米 真的暴力
00:0000:00
VID_20230624_151456.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。
亮个相吧小宝贝儿❗️
混控前进后退 差速转向
旋钮遥控炮塔旋转、俯仰角
00:0000:00
VID_20230624_155819.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。
接下来就是等件儿到了组装我自制的双流波箱 然后测试 希望可以使用
电磁坦克弄大点口径,搞抛射多有意思,哈哈
炮弹里放点儿面粉,boom 可以染色对方坦克
更新一张底盘吧 加工的零件还没到 这小老虎是越来越沉了

一段双流传动系统的测试视频
00:0000:00
VID_20230716_134331.mp4
点击下载
仅供内部学术交流或培训使用,请先保存到本地。本内容不代表科创观点,未经原作者同意,请勿转载。



























200字以内,仅用于支线交流,主线讨论请采用回复功能。