


难道它工作时候要一直由USB供电?
35031
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22t35031%22%2C%22tid%22%3A%2235031%22%2C%22mainForumsId%22%3A%5B%2237%22%5D%2C%22categoriesId%22%3A%5B%2247%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
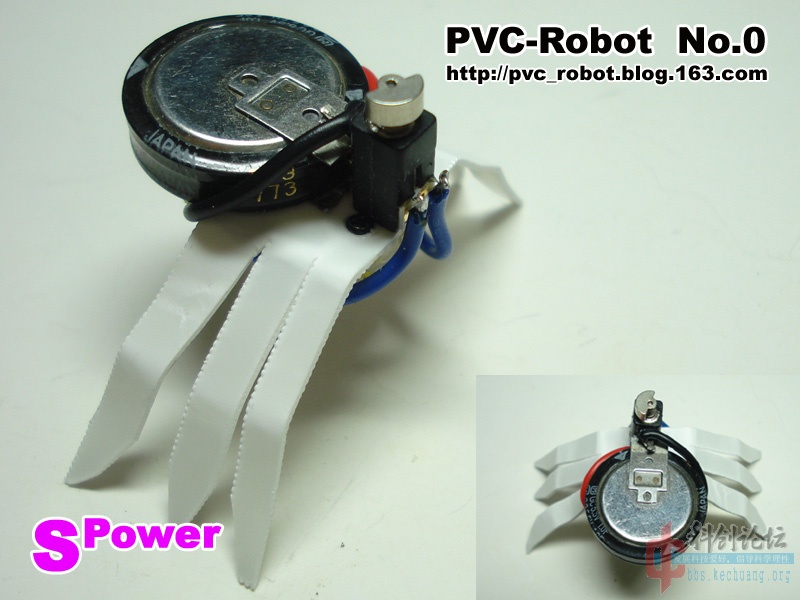
PVC-Robot【0号】暴走的臭虫——振动机器人
PVC-Robot 0号机器人是被称为“暴走臭虫”的振动机器人,这里介绍的是采用超级电容作为电源的S1版0号机器人。
![PVC-00-S1.jpg]()
点击此处查看视频
1.1、基本原理
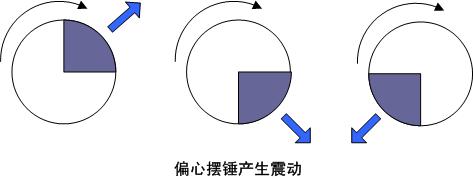
PVC-Robot 0号所有版本的机器人的运动原理都是一样的,即都是利用带偏心锤的振动电机产生的震动波促使身体产生位移,振动的幅度越大、身体支撑得越不稳定,则运动的效果就越明显。
![震动马达原理.jpg]()
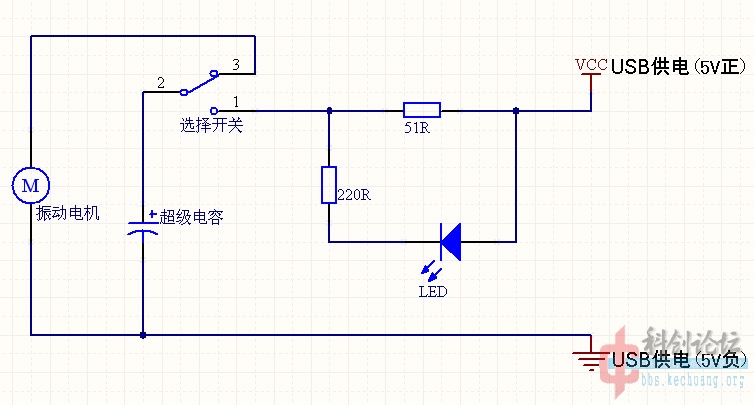
当前PVC-Robot 0号的S1版机器人,是一个标准的带充电功能的超级电容供电控制电路。
![电路原理.jpg]()
![电路焊电示意图.gif]()
![焊接_底面.gif]()
充电电路
超级电容可反复充电,需要配备充电器。但是与其他可充电电池对充电要求比较严格的情况不同的是,超级电容的充电电路可以很简单(几乎是直接接上电源就可以直接充电,只要充电的电压不高于其额定的最大工作电压就可以了,无需要复杂的充电保护电路),所以我们是把超级电容的充电电路直接做到具体机器人的控制电路中,不再需要要额外的充电器。
考虑到我们蓄能系列所采用的超级电容最高工作电压在5V左右的,为了方便和降低成本,超级电容充电电路我们采用基于电脑的USB接口的供电(注:电脑USB口供电电压为5V),即可以直接插接到电脑的USB口为超级电容充电。当然也可以连接普通带有USB口的开关电源(要求电压为5V)一起使用。
由于我们只是把USB口作为充电器的供电电源,所以USB接口我们只需要连接其中的电源引脚即可。
![USB接口定义.gif]()
这应该说是一个带充电功能的超级电容供电控制电路,通过一个选择开关控制超级电容是对负载进行放电,或是接受充电。该电路的具体工作原理说明如下,有兴趣的朋友可以了解一下:
放电:
选择开关的节点2,拨到节点3的位置时,超级电容直接连接负载(比如:电机),将进行放电以驱动负载。
充电:
选择开关的节点2,拨到节点1的位置时,超级电容将利用USB提供的5V电源进行充电。开始充电时,LED发光二极管发光;充满后,LED发光二极管熄灭,提醒充电结束。
1、超级电容与51R的电阻其实是串联在USB电源上的,根据串联电路的原理,我们知道超级电容两端的电压加上51R两端的电压,应该正好等于电源的电压(5V)。
2、LED发光二极管有一个开始发光的导通电压,并联在51R电阻两端的LED发光二极管其实就是用来检测51R电阻两端的电压的:
(1)刚开始充电时,超级电容两端电压比较低,则51R电阻两端的电压比较高,也就是LED发光二极管得到比较高的电压开始发光,说明充电进行中;
(2)当超级电容逐步充上电后,其两端的电压会升高,而同时51R电阻两端的电压逐渐下降,LED发光二极管得到的电压也在下降则其发光的亮度也会逐步变暗;
(3)当超级电容充电到一定程度后,其两端的电压会高到一定的数值,而51R电阻两端的电压也会降到一定的数值,LED发光二极管获得的电压也会低到一个数值,当这个数值低于发光二极管的导通电压时,则发光二极管熄灭,提醒充电结束。
对于与LED发光二极管串联在一起的220R电阻,其实是作为保护LED发光二极管的限流电阻,避免充电初期时由于51R电阻两侧的电压较高可能导致通过LED发光二极管的电流太大而烧坏LED发光二极管。
特别注意:当LED发光二极管熄灭的时候,其实超级电容还没有充满电的,而且充电还是会继续。这个时候超级电容两端的电压只是到了大约3V多的程度(电源5V 减去 发光二极管的导通电压),只有当超级电容两端的电压接近电源的电压(5V)时,才算基本充满。而由于超级电容不用担心过度充电问题,只要充电电压不高于其最高工作电压,还可以让其继续处于充电状态。
另外,选用的LED发光二极管要求导通电压尽可能低一些,这样在其熄灭的时候超级电容就可以充更多的电。这里我们选用导通电压比较低的“红色发红光”的LED发光二极管,其导通电压一般为1.6V左右,也就是说其熄灭的时候超级电容可以充电到3.4V左右。
综上,[u]发光二极管熄灭,实际上代表超级电容已经充电到一定程度,不用马上停止充电,可以继续让其充电[/b]。
我们把超级电容的充电电路直接内置于具体机器人的控制电路板上,而该电路板直接通过USB电源转接线活动充电用的电源。
对于蓄能系列机器人中,一般控制电路板我们设计做成如下样式,上面代一个PH插座。然后,再配以一条带PH插头的充电USB线(即:USB-PH电源转接线)。
![1.jpg]()
![2.jpg]()
![3.jpg]()
![4.jpg]()
![5.jpg]()
![6.jpg]()
![7.jpg]()
[/u] 本型号版本的机器人,大约充电时间在10到20秒左右,而持续运动的时间大约在1分钟到2分钟左右,这对于一个简单振动方式运动的机器人也算基本足够了。
[u][/b]
点击此处查看视频
1.1、基本原理
PVC-Robot 0号所有版本的机器人的运动原理都是一样的,即都是利用带偏心锤的振动电机产生的震动波促使身体产生位移,振动的幅度越大、身体支撑得越不稳定,则运动的效果就越明显。
当前PVC-Robot 0号的S1版机器人,是一个标准的带充电功能的超级电容供电控制电路。
充电电路
超级电容可反复充电,需要配备充电器。但是与其他可充电电池对充电要求比较严格的情况不同的是,超级电容的充电电路可以很简单(几乎是直接接上电源就可以直接充电,只要充电的电压不高于其额定的最大工作电压就可以了,无需要复杂的充电保护电路),所以我们是把超级电容的充电电路直接做到具体机器人的控制电路中,不再需要要额外的充电器。
考虑到我们蓄能系列所采用的超级电容最高工作电压在5V左右的,为了方便和降低成本,超级电容充电电路我们采用基于电脑的USB接口的供电(注:电脑USB口供电电压为5V),即可以直接插接到电脑的USB口为超级电容充电。当然也可以连接普通带有USB口的开关电源(要求电压为5V)一起使用。
由于我们只是把USB口作为充电器的供电电源,所以USB接口我们只需要连接其中的电源引脚即可。
这应该说是一个带充电功能的超级电容供电控制电路,通过一个选择开关控制超级电容是对负载进行放电,或是接受充电。该电路的具体工作原理说明如下,有兴趣的朋友可以了解一下:
放电:
选择开关的节点2,拨到节点3的位置时,超级电容直接连接负载(比如:电机),将进行放电以驱动负载。
充电:
选择开关的节点2,拨到节点1的位置时,超级电容将利用USB提供的5V电源进行充电。开始充电时,LED发光二极管发光;充满后,LED发光二极管熄灭,提醒充电结束。
1、超级电容与51R的电阻其实是串联在USB电源上的,根据串联电路的原理,我们知道超级电容两端的电压加上51R两端的电压,应该正好等于电源的电压(5V)。
2、LED发光二极管有一个开始发光的导通电压,并联在51R电阻两端的LED发光二极管其实就是用来检测51R电阻两端的电压的:
(1)刚开始充电时,超级电容两端电压比较低,则51R电阻两端的电压比较高,也就是LED发光二极管得到比较高的电压开始发光,说明充电进行中;
(2)当超级电容逐步充上电后,其两端的电压会升高,而同时51R电阻两端的电压逐渐下降,LED发光二极管得到的电压也在下降则其发光的亮度也会逐步变暗;
(3)当超级电容充电到一定程度后,其两端的电压会高到一定的数值,而51R电阻两端的电压也会降到一定的数值,LED发光二极管获得的电压也会低到一个数值,当这个数值低于发光二极管的导通电压时,则发光二极管熄灭,提醒充电结束。
对于与LED发光二极管串联在一起的220R电阻,其实是作为保护LED发光二极管的限流电阻,避免充电初期时由于51R电阻两侧的电压较高可能导致通过LED发光二极管的电流太大而烧坏LED发光二极管。
特别注意:当LED发光二极管熄灭的时候,其实超级电容还没有充满电的,而且充电还是会继续。这个时候超级电容两端的电压只是到了大约3V多的程度(电源5V 减去 发光二极管的导通电压),只有当超级电容两端的电压接近电源的电压(5V)时,才算基本充满。而由于超级电容不用担心过度充电问题,只要充电电压不高于其最高工作电压,还可以让其继续处于充电状态。
另外,选用的LED发光二极管要求导通电压尽可能低一些,这样在其熄灭的时候超级电容就可以充更多的电。这里我们选用导通电压比较低的“红色发红光”的LED发光二极管,其导通电压一般为1.6V左右,也就是说其熄灭的时候超级电容可以充电到3.4V左右。
综上,[u]发光二极管熄灭,实际上代表超级电容已经充电到一定程度,不用马上停止充电,可以继续让其充电[/b]。
我们把超级电容的充电电路直接内置于具体机器人的控制电路板上,而该电路板直接通过USB电源转接线活动充电用的电源。
对于蓄能系列机器人中,一般控制电路板我们设计做成如下样式,上面代一个PH插座。然后,再配以一条带PH插头的充电USB线(即:USB-PH电源转接线)。







[/u] 本型号版本的机器人,大约充电时间在10到20秒左右,而持续运动的时间大约在1分钟到2分钟左右,这对于一个简单振动方式运动的机器人也算基本足够了。
[u][/b]

USB是用于充电的
大约充电时间在10到20秒左右,而持续运动的时间大约在1分钟到2分钟左右,
大约充电时间在10到20秒左右,而持续运动的时间大约在1分钟到2分钟左右,
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
是的,这里使用的是“超级电容”作为电源。
使用超级电容作为电源,不需要担心常规电池所谓“过充电”和“过放电”问题。
超级电容,是近年来新发展出来的一种全新的大容量电容,即常说的“黄金电容”。相对于一般电容的容值只在微法(μF)级别的,在体积增加不多的情况下,这种超级电容的容值达到了法拉(F)级别,所以其又被称为“法拉电容”。
超级电容的特点:
(1)充电速度快,充电10秒~10分钟可达到其额定容量的95%以上;
(2)循环使用寿命长,深度充放电循环使用次数可达1~50万次,没有“记忆效应”;
(3)大电流放电能力超强,能量转换效率高,过程损失小,大电流能量循环效率≥90%;
(4)功率密度高,可达300W/KG~5000W/KG,相当于电池的5~10倍;
(5)产品原材料构成、生产、使用、储存以及拆解过程均没有污染,是理想的绿色环保电源;
(6)充放电线路简单,无需充电电池那样的充电电路,安全系数高,长期使用免维护;
(7)超低温特性好,温度范围宽-40℃~+70℃;
(8)检测方便,剩余电量可直接读出;
(9)容量范围通常0.1F--1000F 。
鉴于超级电容拥有的特点,其目前已经被广泛应用于各种蓄能或者备用电源的系统中,甚至被直接作为电源使用。
更多关于“超级电容”的介绍,请参考:百度百科——超级电容,百度百科——法拉电容
使用超级电容作为电源,不需要担心常规电池所谓“过充电”和“过放电”问题。
超级电容,是近年来新发展出来的一种全新的大容量电容,即常说的“黄金电容”。相对于一般电容的容值只在微法(μF)级别的,在体积增加不多的情况下,这种超级电容的容值达到了法拉(F)级别,所以其又被称为“法拉电容”。
超级电容的特点:
(1)充电速度快,充电10秒~10分钟可达到其额定容量的95%以上;
(2)循环使用寿命长,深度充放电循环使用次数可达1~50万次,没有“记忆效应”;
(3)大电流放电能力超强,能量转换效率高,过程损失小,大电流能量循环效率≥90%;
(4)功率密度高,可达300W/KG~5000W/KG,相当于电池的5~10倍;
(5)产品原材料构成、生产、使用、储存以及拆解过程均没有污染,是理想的绿色环保电源;
(6)充放电线路简单,无需充电电池那样的充电电路,安全系数高,长期使用免维护;
(7)超低温特性好,温度范围宽-40℃~+70℃;
(8)检测方便,剩余电量可直接读出;
(9)容量范围通常0.1F--1000F 。
鉴于超级电容拥有的特点,其目前已经被广泛应用于各种蓄能或者备用电源的系统中,甚至被直接作为电源使用。
更多关于“超级电容”的介绍,请参考:百度百科——超级电容,百度百科——法拉电容
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
确实这个电路由于电阻的问题,在几十秒内实际充电是无法充到5V的,关于这个问题我在原文中也有详细说明,只是这里发布受到限制所以都省略了。
即便如此,达不到5V,充电几十秒,能够跑到一两分钟不奇怪。当然,这也是有前提的,如果非要拿一个大电流的电机作负载,可能放电几秒就不行了吧。这里只是具体问题具体对待,实际的东西已经做出来,效果也在视频中有发布。
另外,现在已经有超大容量的超级电容,已经有机构甚至在研究直接作为汽车的动力能源了。
即便如此,达不到5V,充电几十秒,能够跑到一两分钟不奇怪。当然,这也是有前提的,如果非要拿一个大电流的电机作负载,可能放电几秒就不行了吧。这里只是具体问题具体对待,实际的东西已经做出来,效果也在视频中有发布。
另外,现在已经有超大容量的超级电容,已经有机构甚至在研究直接作为汽车的动力能源了。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。