加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
不用尝试这么喊我杠精找回面子,丢光了就是丢光了捂着脸去谷歌学习就完了。
你见过谁开环步进折腾pid和rs485的。
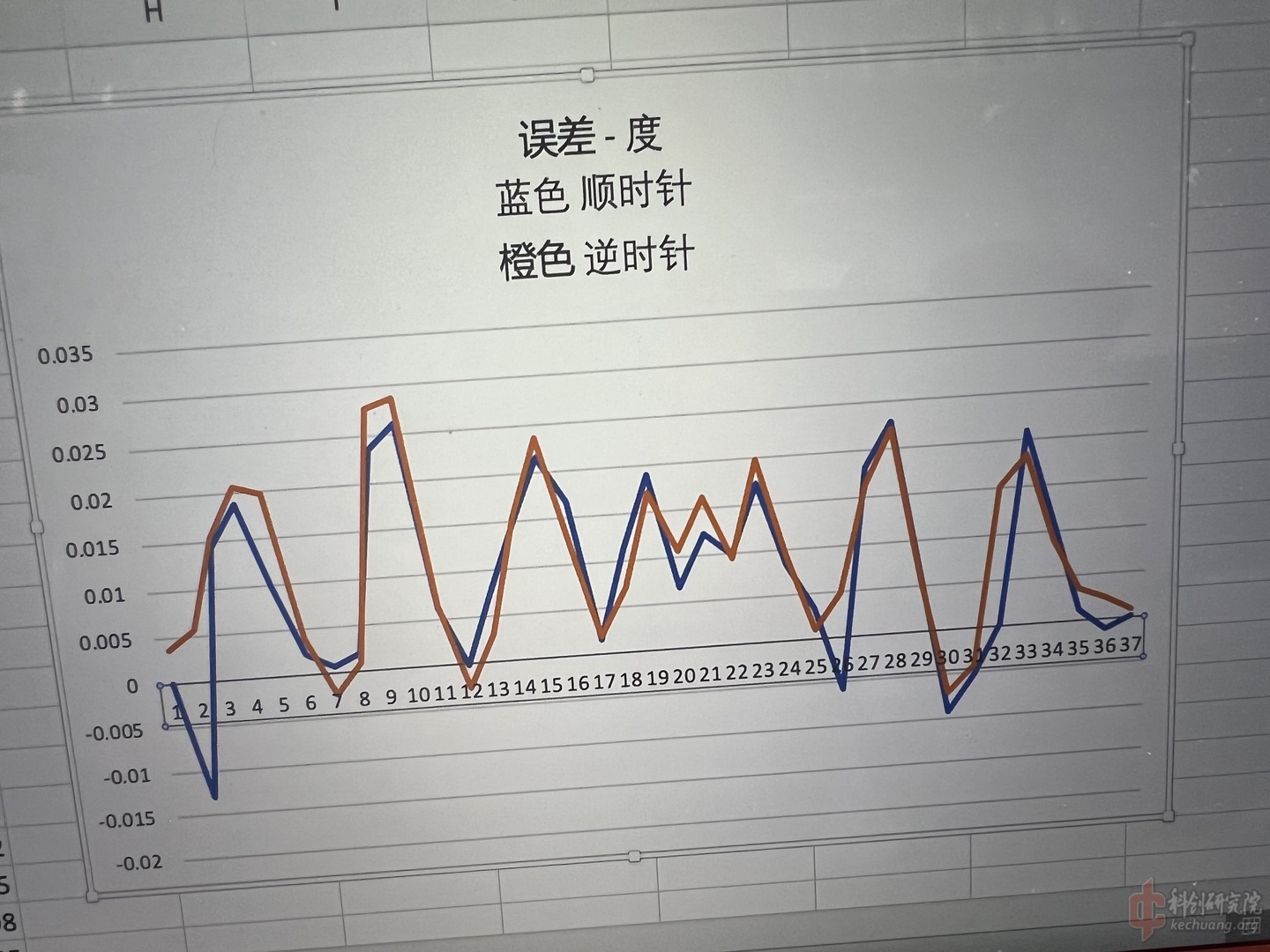
步距角误差也不是你这么意淫出来煞有介事一个公式,稍微谷歌一下就知道你连概念都理解错了。
实在是不懂英语,这个问题百度文库一样有
https://wk.baidu.com/view/61fc494b346baf1ffc4ffe4733687e21af45fff5?_wkts_=1696718421663
至于所谓的加减速机,时间换精度,这种拍脑袋想当然的事情,不考虑成本的情况下,花高性能光编伺服的10倍价格买个无回差谐波减速机的精度我还真测过,比这个驱动轴自带的磁编伺服性能还要差一个量级。

还是那句话,自己跟不上时代就不要到处装逼捏造公式和结论来误导别人,戳穿了就开始说人是杠精。




