加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
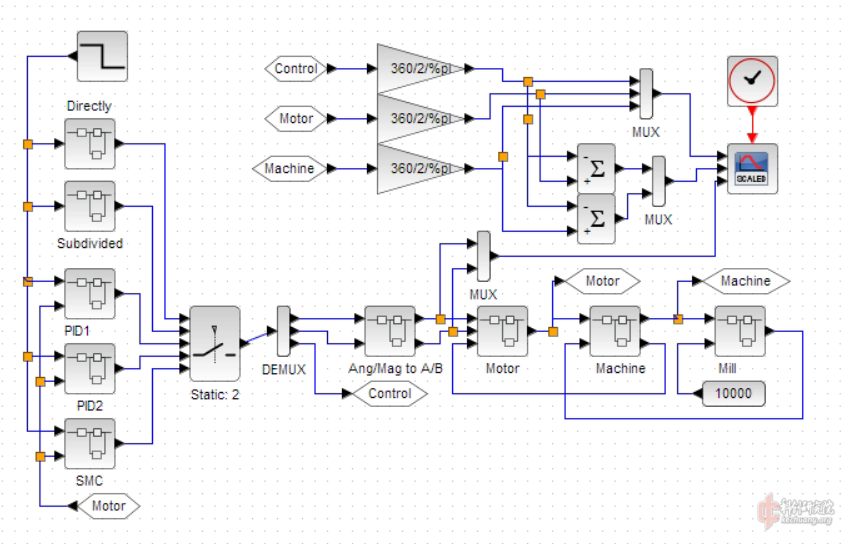
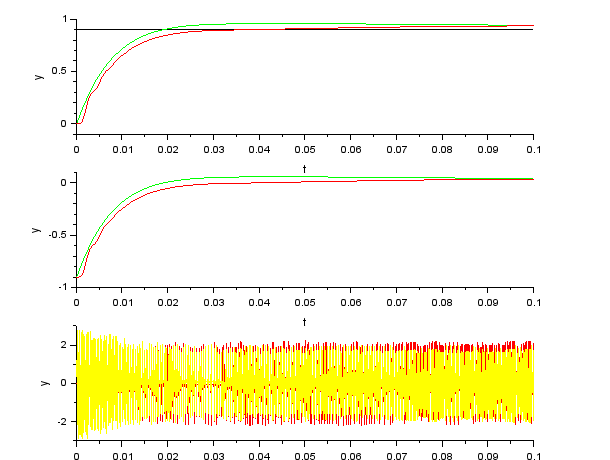
今天修改了一些模型 重构了流程图 并比较了在同一种电机/机械系统/铣雕任务下 非细分细分和位置单环PID的效果
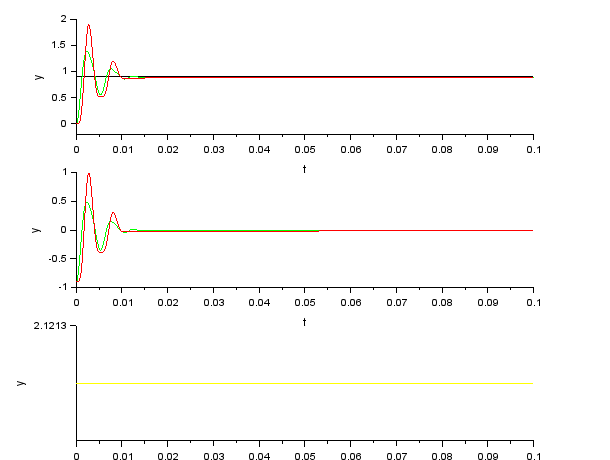
直接驱动效果如下 (第三个曲线是电机相电流)
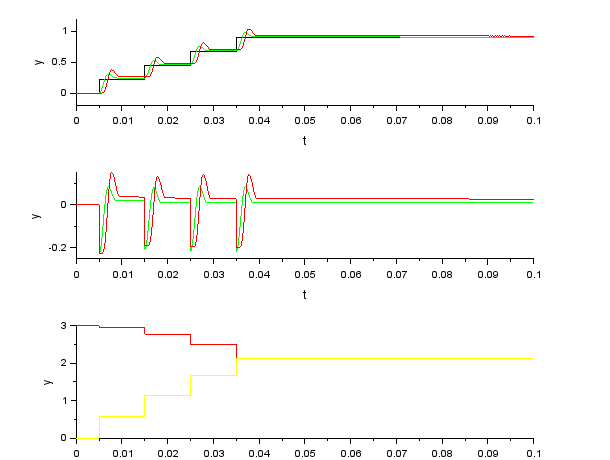
细分的效果如下
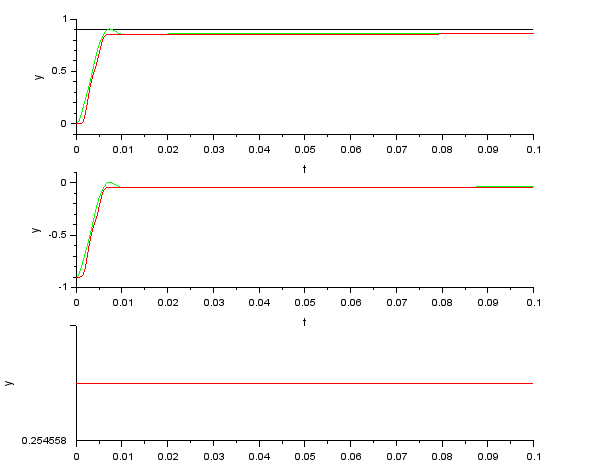
位置单环PID(为省麻烦在连续域下做)效果如下
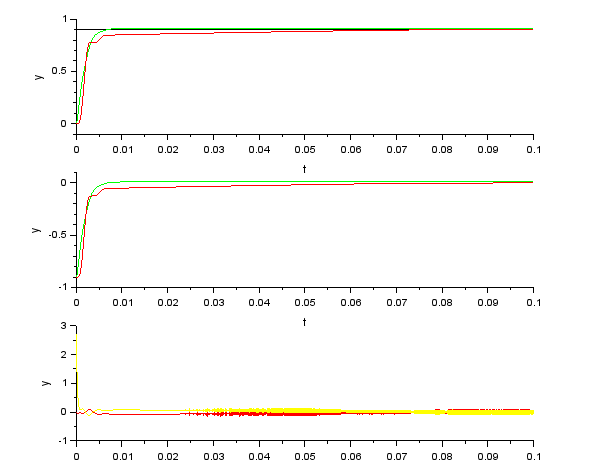
不得不说 参数调好的PID效果是惊人的 无震荡 快速到位 然而参数的校调并不容易 Kp要小于直接驱动时候等效的"转矩/夹角"比是关键的方法 其他参数也需要比较保守 不然甚至会产生激烈震荡的电机电流(在不停地纠正) 然而在非连续域可能会有别的结果
其实直接开环驱动 也类似没有Ki/Kd的PID 而且Kp的线性关系 变成了正弦关系 于是我试着使用满电流的1/8去做开环驱动 也得到了近似无震荡的效果
但是显然 因为电流太小 并不合适实际应用 (而PID因为有积分项 遇到大阻力可以逐渐提高电流) 不过我想起Trinamic公司的几个开环驱动 也能做到类似静音之类的效果 我猜想大抵也和开环时候的电流控制有关 比如电流慢慢到位?




