加载中
加载中
表情图片
评为精选
鼓励
加载中...
文件下载
加载中...
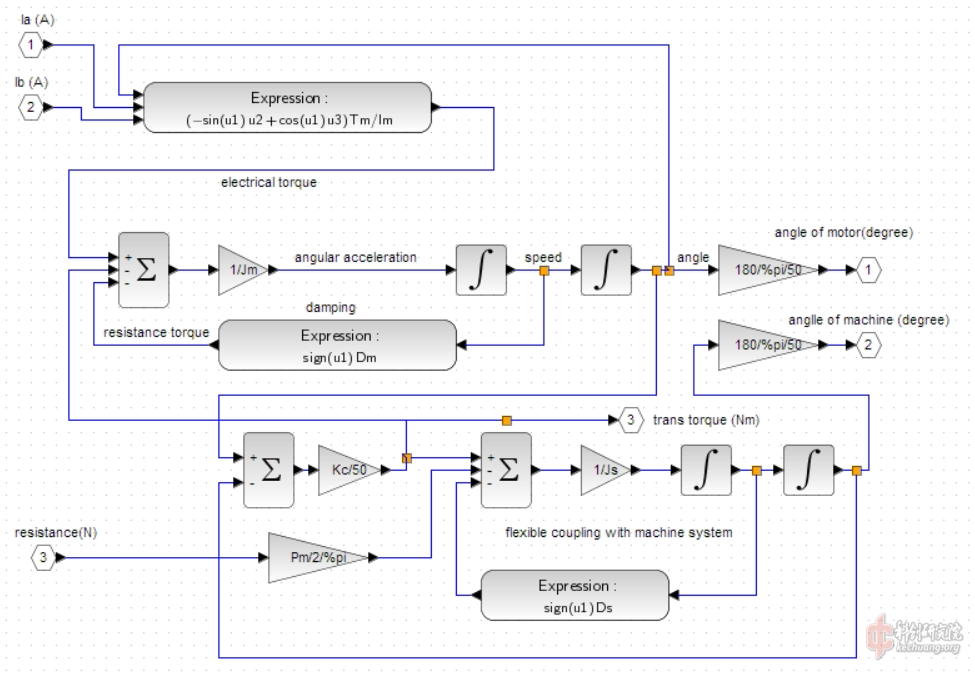
终于把普通开环驱动的情况下的仿真做好了 当然 也是因为理想化和简化的 什么齿槽转矩 磁阻转矩都不考虑 就当一个理想50极200步的步进电机 通过一个弹性联轴器 模5的滚珠丝杆 连上一个20公斤的质量块 只考虑摩擦力阻尼 不考虑与润滑油之类相关的与速度有关的阻尼 仿真了在整步内进行45度转动的情况 此时并无铣雕负荷
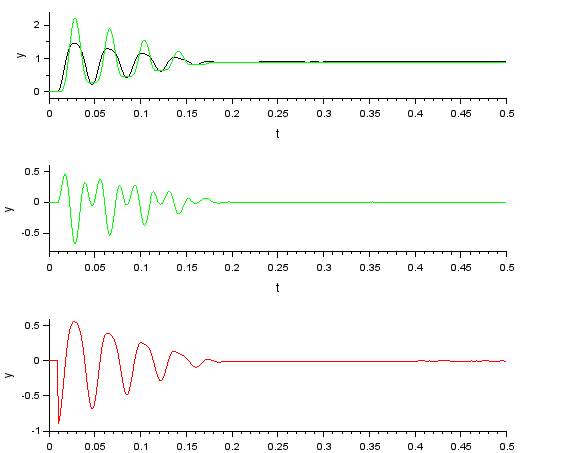
对比了有细分和没细分的结果 显然没有细分 电机发生比较严重的震荡 第一个曲线是电机位置(度数 黑色)和滑块折算的度数(绿色) 虽然最后也停在了0.9度 但是看第三个曲线的误差图 有0.5度的震荡 第二个曲线是扭矩变化
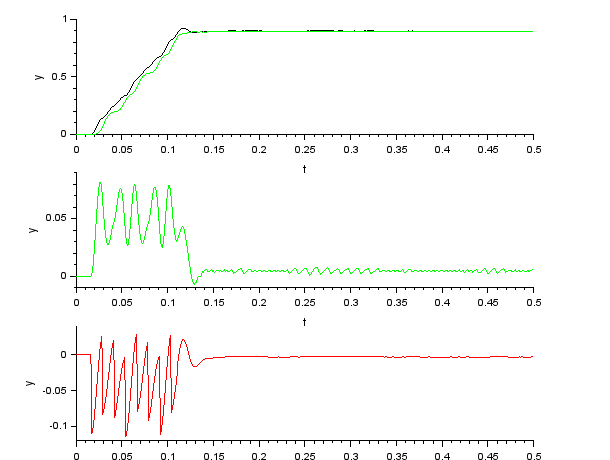
有细分(16细分)之后 明显精度提高了 误差只有0.1度 折算到滑块上 仅仅是1.4um 也就是不到一个细分步