
项目特性:成本尽量控制在100元以下的入门水管机
然而因为没做过火箭,故前来请指一条明路
头锥设计
利用冯·卡门曲线进行头锥设计
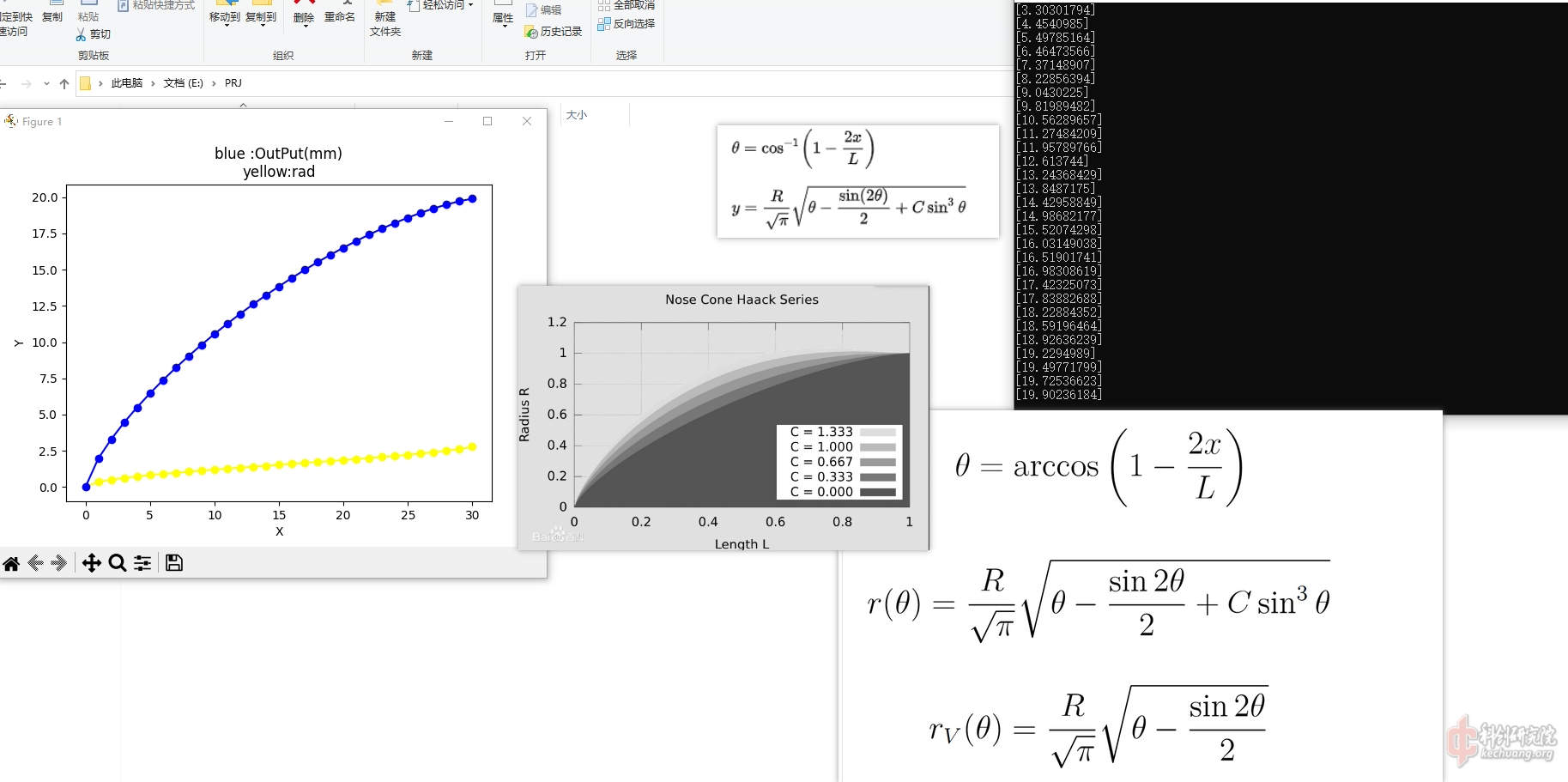
软件是自己写的,网上找不到
使用SW进行建模,由于使用的是放样,而冯卡门曲线在前半段(以顶点为初始点)变化率比较大,我没有因此多设置几个样本点,因而导致流体模拟结果似乎是失败了

目前打算的固定方式是插入……
飞控主板
使用CH32F103C6T6作为主控(这是最省钱的方案)
第一次测试使用STM32F103C6T6作为主控(C8T6因为炒芯片我早就用不起了)
原理图(一个问题!)

使用TP4057为小电池供电
使用IPS5306为大型电池供电
两者输出分开,共地,因为没做过不知道能不能正常工作,目标是单片机可以控制舵机并且舵机转动的时候也不会影响到单片机的电压从而保证系统稳定性
布线图(两个问题!)

板载MPU6050、BMP280、SHT41
分别是加速度(用来控制翼面)
气压(测高)
湿度传感器(科学载荷)
设计方案是开机3秒后,如果没有收到串口信号,开始记录数据并且存储到Flash
存储频率是10Hz,舵机调节位于主程序死循环
如果开机收到串口信号就输出上一次关机的信息

宽度是20mm,目标是水管,但是不知道如何保证气动布局
那种塔式的我做不起,要很多板子,因此我特意设计成一个板子
也不知道如何进行重量配平
一个18650电池一个250mah小电池
鸭翼(两个问题!)
翼面不知道该怎么做
为了省钱我使用两枚2g舵机进行控制
初步决定是十字形或者三等分,不知道选什么

红色的是舵机可控的翼面
不考虑自旋问题,因为自旋似乎能够提高稳定性
但是如果自旋的话那箭载摄像器就没啥用了……
算法(一个问题!)

准确来说是压根没开始写
打算使用PID算法进行控制,但是因为我不会,最终还是决定根据角度加速度改变舵机角度
发动机(两个问题!)

水管机试车台
可以测量实时推力
根据
XXXXXXXXXXXXXXXXXXXXXXXX/t/84739
拟定配比

使用恒温电热台进行制作
但是还没做
另一个问题则是:
喷口我用的是陶瓷直型堵头
使用石膏进行固定
20230628
