

程序这是祖国版魔改的,感觉魔友自己对arduino的blink语句也是半罐子水,所以我也看的一团乱麻
81233
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22829288%22%2C%22tid%22%3A%2281233%22%2C%22mainForumsId%22%3A%5B%22134%22%5D%2C%22categoriesId%22%3A%5B%22438%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
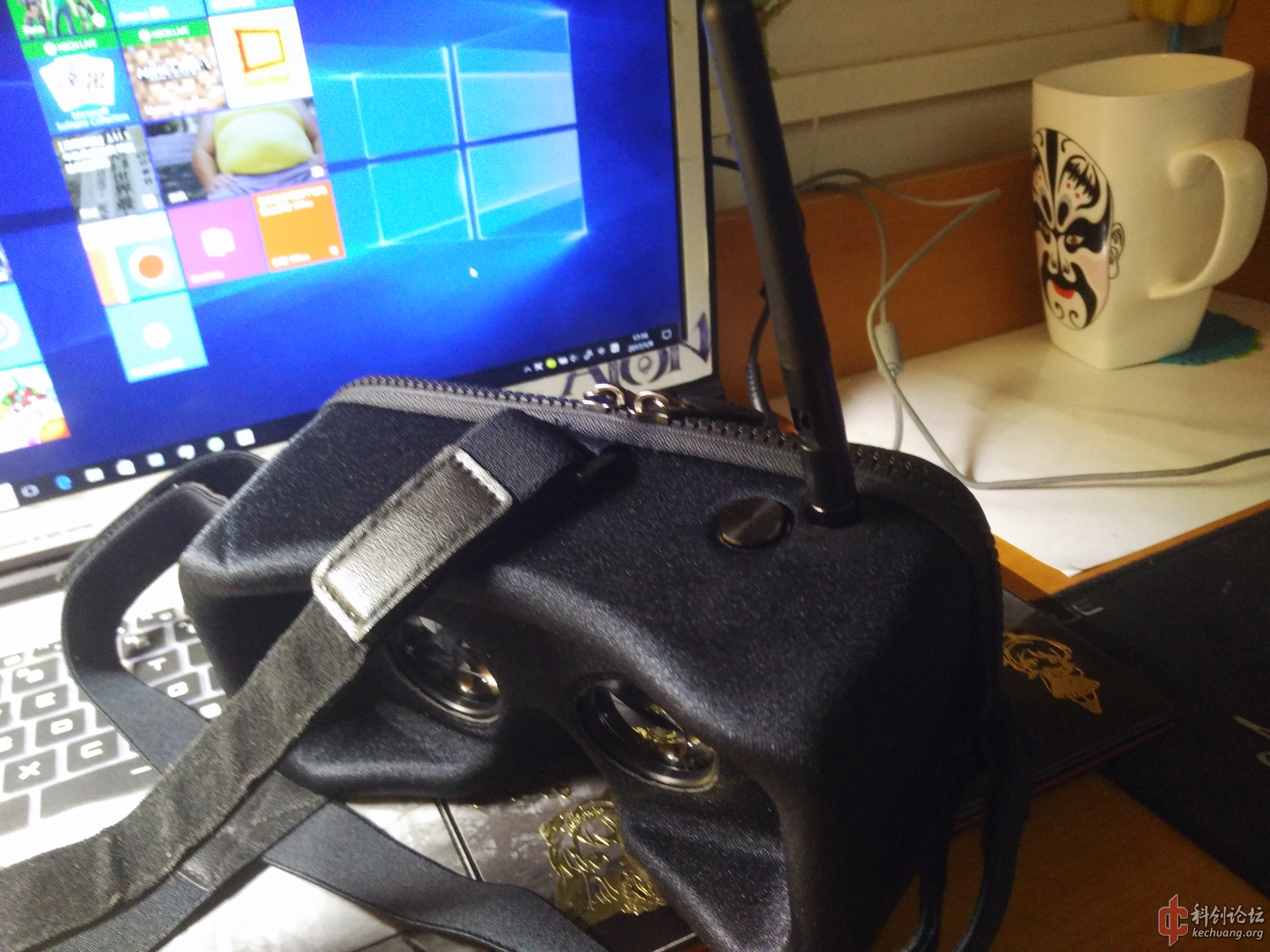
煎饼:vr头追难题解决
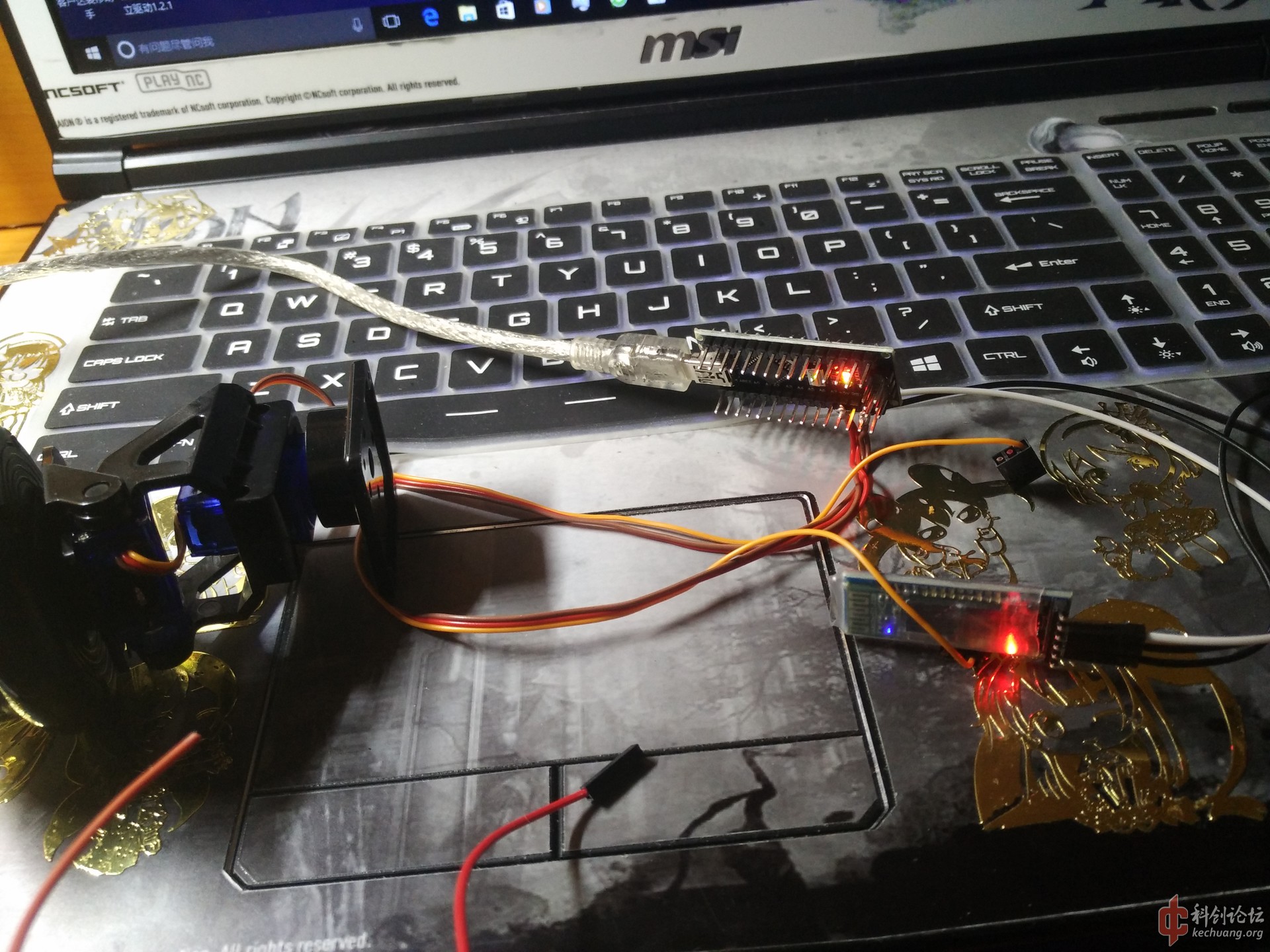
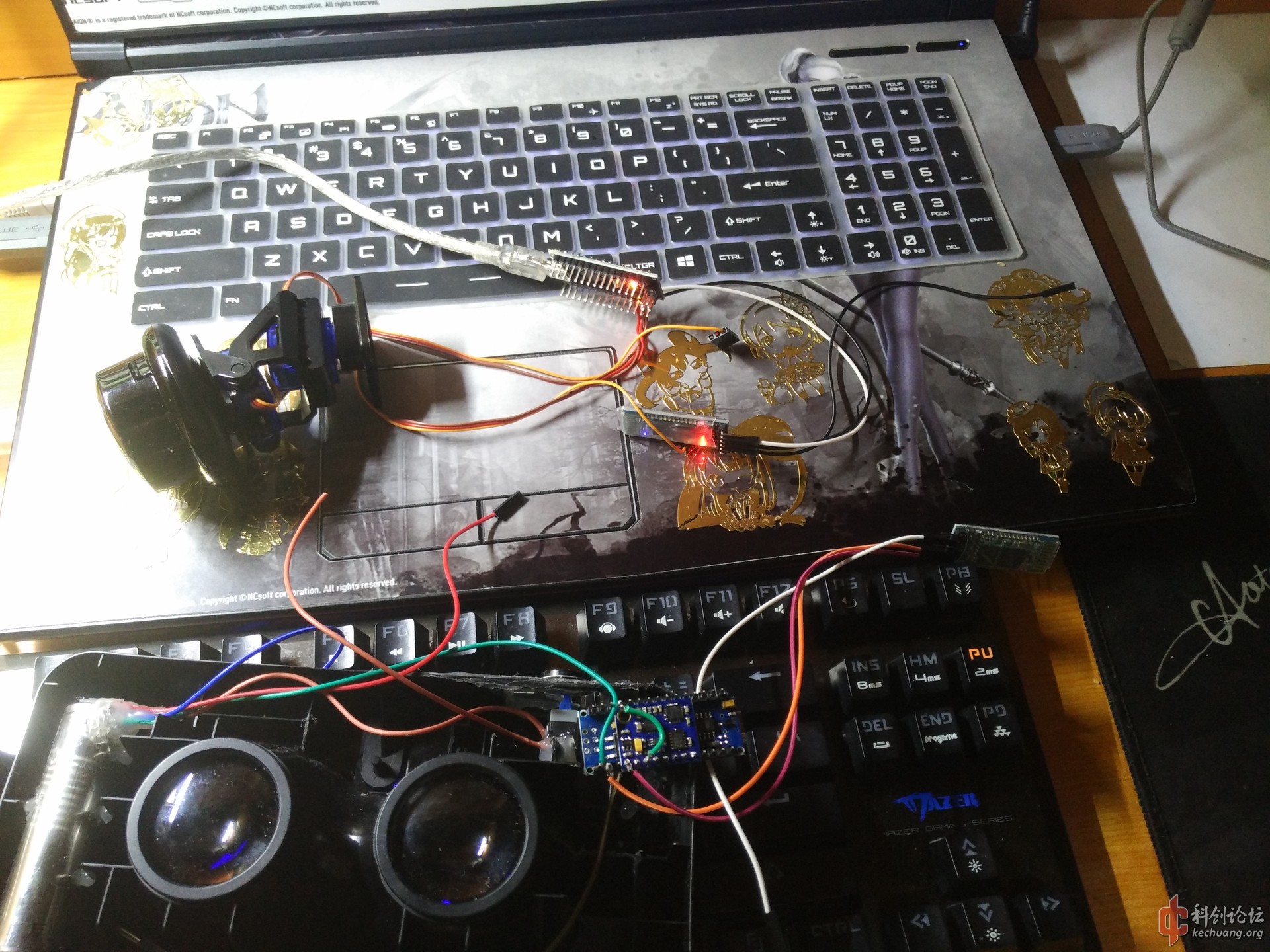
摄像头是小蚁的(拆开来看到Xbee,紫蜂通讯。直接买的小米VR,不准备做FPV。两块arduino nano,两块蓝牙主从一体模块,GY-85九轴传感器,舵机云台。硬件差不多布线完成了,软件方面参考XXXXXXXXXXXXXXXXXXXXXX/p/4445673292
发现他arduino语句有问题
因为煎饼还处于单片机跑马灯阶段,蓝牙更不懂,所以哪位程序猿帮我看看![IMG_20170109_171053.jpg]()
![IMG_20170109_171045.jpg]()
![IMG_20170109_171112.jpg]()
![IMG_20170109_171651.jpg]()
![IMG_20170109_171659.jpg]()
头追程序
// Written by Dennis Frie - 2012
// Contact: XXXXXXXXXie@XXXXXXXXX
// Version 0.08
// Discussion:
// XXXXXXXXXXXXXXXXXXXXXXX/forums/XXXXXXXXXXXXXp?t=1677559
/*
Channel mapping/config for PPM out:
1 = PPM CHANNEL 1
2 = PPM CHANNEL 2
3 = PPM CHANNEL 3
4 = PPM CHANNEL 4
5 = PPM CHANNEL 5
6 = PPM CHANNEL 6
7 = PPM CHANNEL 7
8 = PPM CHANNEL 8
9 = PPM CHANNEL 9
10 = PPM CHANNEL 10
11 = PPM CHANNEL 11
12 = PPM CHANNEL 12
20 = ANALOG INPUT 0
21 = ANALOG INPUT 1
22 = ANALOG INPUT 2
23 = ANALOG INPUT 3
24 = ANALOG INPUT 4
25 = ANALOG INPUT 5
26 = ANALOG INPUT 6
27 = ANALOG INPUT 7
20 = DIGITAL INPUT 0
21 = DIGITAL INPUT 1
22 = DIGITAL INPUT 2
23 = DIGITAL INPUT 3
24 = DIGITAL INPUT 4
25 = DIGITAL INPUT 5
26 = DIGITAL INPUT 6
27 = DIGITAL INPUT 7
30 = HT pan
31 = HT tilt
32 = HT roll
Mapping example:
$123456789111CH
*/
#include <Wire.h>
#include "config.h"
#include "functions.h"
#include "sensors.h"
#include "ServoSupport.h"
#include <EEPROM.h>
extern unsigned char channel_mapping[];
extern unsigned char PpmIn_PpmOut[13];
extern char read_sensors;
extern long channel_value[];
extern float gyroOff[];
int counter =0; // Delay for serial-output.
char printPlot = 0; // print plot for GUI?
// External variables (from sensors.h):
extern float tiltBeta;
extern float panBeta;
extern float gyroWeight;
extern float GyroWeightPan;
extern int maxPulse;
extern int servoPanCenter;
extern int servoTiltCenter;
extern int servoRollCenter;
extern int panMaxPulse;
extern int panMinPulse;
extern int tiltMaxPulse;
extern int tiltMinPulse;
extern int rollMaxPulse;
extern int rollMinPulse;
extern float panFactor;
extern float tiltFactor;
extern float rollFactor;
extern char tiltInverse;
extern char rollInverse;
extern char panInverse;
extern float magOffset[];
extern int accOffset[];
extern unsigned char htChannels[];
extern char resetValues;
void setup() {
XXXXXXXXXgin(SERIAL_BAUD);
pinMode(7,OUTPUT);
pinMode(9,OUTPUT);
digitalWrite(2,HIGH);
digitalWrite(3,HIGH);
pinMode(0,INPUT);
pinMode(1,INPUT);
pinMode(2,INPUT);
pinMode(3,INPUT);
pinMode(6,INPUT);
pinMode(7,INPUT);
pinMode(8,INPUT);
//Set button pin to input:
pinMode(BUTTON_INPUT,INPUT);
//Set internal pull-up resistor.
digitalWrite(BUTTON_INPUT,HIGH);
digitalWrite(0,LOW); // pull-down resistor
digitalWrite(1,LOW);
digitalWrite(2,HIGH);
digitalWrite(3,HIGH);
XXXXXXXgin(); // Start I2C
// If the device have just been programmed, write initial config/values to EEPROM:
if (XXXXXXXXXad(0) != 8) {
// #if (DEBUG)
XXXXXXXXXintln("New board - saving default values!");
// #endif
init_sensors();
#if (ALWAYS_CAL_GYRO ==0)
setSensorOffset();
#endif
save Settings();
saveMagData();
saveAccData();
EEPROM.write(0,8);
}
getSettings(); // Get settings saved in EEPROM
init_sensors(); // Initialise I2C sensors
calMag();
resetCenter();
init_timer_interrupt(); // Start timer interrupt (for sensors)
ServoSupport::Init();
ServoSupport::SetAng(1,9,90);
ServoSupport::SetAng(2,10,90);
ServoSupport::SetAng(3,8,90);
ServoSupport::Start();
}
char serial_data[101]; // Array for serial-data
unsigned char serial_index =0; // How many bytes have been received?
char string_started = 0; // Only saves data if string starts with right byte
char outputMag = 0;
char outputAcc = 0;
void loop() {
// Check button
if (digitalRead(BUTTON_INPUT)==0) {
resetValues = 1;
}
// All this is used for communication with GUI
if (Serial.available()) {
if (string_started == 1) {
// Read incoming byte
serial_data[serial_index++] = XXXXXXXXXad();
// If string ends with 'CH" it's channel configuration, that have been received.
// String must always be 12 chars/bytes and ending with CH to be valid.
if (serial_data[serial_index-2] == 'C' && serial_data[serial_index-1] == 'H' && serial_index == 14) {
// To keep it simple, we will not let the channels be 0-initialised, but start from 1 to match actual channels.
for (unsigned char i=0; i<13; i++) {
channel_mapping[i+1] = serial_data[i]-48;
// Update the dedicated PPM-in -> PPM-out array for faster performance.
if (serial_data[i]-48 < 14) {
// PpmIn_PpmOut[i+1] = serial_data[i]-48;
PpmIn_PpmOut[serial_data[i]-48] =i+1;
}
}
XXXXXXXXXintln("Channel mapping received");
// Reset serial_index and serial_started
serial_index=0;
string_started = 0;
}
if (serial_data[serial_index-2] == 'H' && serial_data[serial_index-1] == 'E') {
// We need 8 parameters:
// LP_tilt
// LP_pan
// Gyro_weight_tilt
// Gyro_weight_pan
// servo_max
// servo_min
// tilt_servo_gain
// pan_servo_gain
XXXXXXXXXintln("HT config received:");
/*
for (unsigned char k = 0; k< 10; k++) {
valuesReceived[k] =0;
}
*/
int valuesReceived[20] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
int comma_index =0;
for (unsigned char k = 0; k < serial_index-2; k++) {
// Looking for comma
if (serial_data[k] == 44) {
comma_index++;
}
else {
valuesReceived[comma_index] = valuesReceived[comma_index]*10 + (serial_data[k]-48);
}
// Mainly for debug:
#if (DEBUG)
XXXXXXXXXint(serial_data[k]);
#endif
}
#if (DEBUG)
XXXXXXXXXintln();
for (unsigned char k = 0; k < comma_index+1; k++) {
XXXXXXXXXint(valuesReceived[k]);
XXXXXXXXXint(",");
}
XXXXXXXXXintln();
#endif
tiltBeta = (float)valuesReceived[0] / 100;
panBeta = (float)valuesReceived[1] / 100;
gyroWeight = (float)valuesReceived[2] / 100;
GyroWeightPan = (float)valuesReceived[3] / 100;
tiltFactor = (float)valuesReceived[4] / 10;
panFactor = (float)valuesReceived[5] / 10;
rollFactor = (float)valuesReceived[6] / 10;
tiltInverse = 1;
rollInverse = 1;
panInverse = 1;
if (valuesReceived[7] / 100 == 1) {
panInverse = -1;
valuesReceived[7]-=100;
}
if (valuesReceived[7] / 10 == 1) {
rollInverse = -1;
valuesReceived[7]-=10;
}
if (valuesReceived[7] / 1 == 1) {
tiltInverse = -1;
}
serial_index=0;
string_started = 0;
servoPanCenter = valuesReceived[8];
panMinPulse = valuesReceived[9];
panMaxPulse = valuesReceived[10];
servoTiltCenter = valuesReceived[11];
tiltMinPulse = valuesReceived[12];
tiltMaxPulse = valuesReceived[13];
servoRollCenter = valuesReceived[14];
rollMinPulse = valuesReceived[15];
rollMaxPulse = valuesReceived[16];
htChannels[0] = valuesReceived[17];
htChannels[1] = valuesReceived[18];
htChannels[2] = valuesReceived[19];
XXXXXXXXXintln(htChannels[0]);
XXXXXXXXXintln(htChannels[1]);
XXXXXXXXXintln(htChannels[2]);
save Settings();
}
// Debug info
else if (serial_data[serial_index-5] == 'D' && serial_data[serial_index-4] == 'E' && serial_data[serial_index-3] == 'B' && serial_data[serial_index-2] == 'U' && serial_data[serial_index-1] == 'G') {
debugOutput();
serial_index=0;
string_started = 0;
}
// Start magnetometer cal
else if (serial_data[serial_index-4] == 'C' && serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'S' && serial_data[serial_index-1] == 'T') {
outputMag = 1;
serial_index=0;
string_started = 0;
}
// Start accelerometer cal
else if (serial_data[serial_index-4] == 'G' && serial_data[serial_index-3] == 'R' && serial_data[serial_index-2] == 'A' && serial_data[serial_index-1] == 'V') {
outputAcc = 1;
serial_index=0;
string_started = 0;
}
// Stop magnetometer cal
else if (serial_data[serial_index-4] == 'C' && serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'E' && serial_data[serial_index-1] == 'N') {
outputMag = 0;
serial_index=0;
string_started = 0;
}
// Stop accelerometer cal
else if (serial_data[serial_index-4] == 'G' && serial_data[serial_index-3] == 'R' && serial_data[serial_index-2] == 'E' && serial_data[serial_index-1] == 'N') {
outputAcc = 0;
serial_index=0;
string_started = 0;
}
// Start plotting if PLST received:
else if (serial_data[serial_index-4] == 'P' && serial_data[serial_index-3] == 'L' && serial_data[serial_index-2] == 'S' && serial_data[serial_index-1] == 'T') {
printPlot = 1;
serial_index=0;
string_started = 0;
}
// Stop plotting if PLEN received:
else if (serial_data[serial_index-4] == 'P' && serial_data[serial_index-3] == 'L' && serial_data[serial_index-2] == 'E' && serial_data[serial_index-1] == 'N') {
printPlot = 0;
serial_index=0;
string_started = 0;
}
// Save settings
else if (serial_data[serial_index-4] == 'S' && serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'V' && serial_data[serial_index-1] == 'E') {
save Settings();
serial_index=0;
string_started = 0;
}
//Calibrate gyro
else if (serial_data[serial_index-4] == 'C' && serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'L' && serial_data[serial_index-1] == 'I') {
setSensorOffset();
saveSsttings();
XXXXXXXXXint("Gyro offset measured:");
XXXXXXXXXint(gyroOff[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(gyroOff[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(gyroOff[2]);
serial_index=0;
string_started = 0;
}
else if (serial_data[serial_index-2] == 'M' && serial_data[serial_index-1] == 'A') {
XXXXXXXXXintln(serial_data);
int valuesReceived[5] = {0,0,0,0,0};
int comma_index =0;
for (unsigned char k = 0; k < serial_index-2; k++) {
// Looking for comma
if (serial_data[k] == 44) {
comma_index++;
}
else {
valuesReceived[comma_index] = valuesReceived[comma_index]*10 + (serial_data[k]-48);
}
}
magOffset[0] = valuesReceived[0]-2000;
magOffset[1] = valuesReceived[2]-2000;
magOffset[2] = valuesReceived[1]-2000;
saveMagData();
}
else if (serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'C' && serial_data[serial_index-1] == 'C') {
XXXXXXXXXintln(serial_data);
int valuesReceived[5] = {0,0,0,0,0};
int comma_index =0;
for (unsigned char k = 0; k < serial_index-3; k++) {
// Looking for comma
if (serial_data[k] == 44) {
comma_index++;
}
else {
valuesReceived[comma_index] = valuesReceived[comma_index]*10 + (serial_data[k]-48);
}
}
accOffset[0] = valuesReceived[0]-2000;
accOffset[1] = valuesReceived[1]-2000;
accOffset[2] = valuesReceived[2]-2000;
saveAccData();
}
// If more than 100 bytes have been received, the string is not valid. Reset and "try again" (wait for $ to indicate start of new string).
else if (serial_index > 100) {
serial_index = 0;
string_started = 0;
}
}
else if (XXXXXXXXXad() == '$') {
string_started = 1;
}
}
// if "read_sensors" flag is set high, read sensors and update
if (read_sensors == 1) {
updateSensors();
gyroCalc();
accCalc();
magCalc();
filter();
if (counter++ >7) {
// testGyroOutput();
// testMagOutput();
// quickTest();
if (printPlot == 1) {
headtrackerOutput();
}
else if (outputMag) {
calMagOutput();
}
else if (outputAcc) {
calAccOutput();
}
counter=0;
}
// Will first update read_sensors when everything's done.
read_sensors = 0;
}
}
void saveSettings() {
// This is the necessary head-tracler settings:
/*
tiltBeta = (float)valuesReceived[0] / 100;
panBeta = (float)valuesReceived[1] / 100;
gyroWeight = (float)valuesReceived[2] / 100;
GyroWeightPan = (float)valuesReceived[3] / 100;
maxPulse = valuesReceived[4];
servoCenter = valuesReceived[5];
tiltFactor = (float)valuesReceived[6] / 10;
panFactor = (float)valuesReceived[7] / 10;
*/
// Chars
EEPROM.write(1,(unsigned char) (tiltBeta*100));
EEPROM.write(2,(unsigned char) (panBeta*100));
EEPROM.write(3,(unsigned char) (gyroWeight*100));
EEPROM.write(4,(unsigned char) (GyroWeightPan*100));
// And some integers
EEPROM.write(5,(unsigned char)maxPulse);
EEPROM.write(6,(unsigned char)(maxPulse>>8));
EEPROM.write(7,(unsigned char)servoPanCenter);
EEPROM.write(8,(unsigned char)(servoPanCenter>>8));
EEPROM.write(9,(unsigned char) (tiltFactor*10));
EEPROM.write(10,(int)((tiltFactor*10))>>8);
EEPROM.write(11,(unsigned char) (panFactor*10));
EEPROM.write(12,(int)((panFactor*10))>>8);
// Channel inverse settings:
EEPROM.write(13,(unsigned char)(tiltInverse+1));
EEPROM.write(14,(unsigned char)(rollInverse+1));
EEPROM.write(15,(unsigned char)(panInverse+1));
EEPROM.write(16,(unsigned char)servoTiltCenter);
EEPROM.write(17,(unsigned char)(servoTiltCenter>>8));
EEPROM.write(18,(unsigned char)servoRollCenter);
EEPROM.write(19,(unsigned char)(servoRollCenter>>8));
EEPROM.write(20,(unsigned char)panMaxPulse);
EEPROM.write(21,(unsigned char)(panMaxPulse>>8));
EEPROM.write(22,(unsigned char)panMinPulse);
EEPROM.write(23,(unsigned char)(panMinPulse>>8));
EEPROM.write(24,(unsigned char)tiltMaxPulse);
EEPROM.write(25,(unsigned char)(tiltMaxPulse>>8));
EEPROM.write(26,(unsigned char)tiltMinPulse);
EEPROM.write(27,(unsigned char)(tiltMinPulse>>8));
EEPROM.write(28,(unsigned char)rollMaxPulse);
EEPROM.write(29,(unsigned char)(rollMaxPulse>>8));
EEPROM.write(30,(unsigned char)rollMinPulse);
EEPROM.write(31,(unsigned char)(rollMinPulse>>8));
EEPROM.write(32,(unsigned char)htChannels[0]);
EEPROM.write(33,(unsigned char)htChannels[1]);
EEPROM.write(34,(unsigned char)htChannels[2]);
// Saving gyro calibration values
int temp = (int)(gyroOff[0]+500.5);
EEPROM.write(35,(unsigned char)temp);
EEPROM.write(36,(unsigned char)(temp>>8));
temp = (int)(gyroOff[1]+500.5);
EEPROM.write(37,(unsigned char)temp);
EEPROM.write(38,(unsigned char)(temp>>8));
temp = (int)(gyroOff[2]+500.5);
EEPROM.write(39,(unsigned char)temp);
EEPROM.write(40,(unsigned char)(temp>>8));
XXXXXXXXXintln("Settings saved!");
}
void getSettings() {
tiltBeta = (float)XXXXXXXXXad(1)/100;
panBeta = (float)XXXXXXXXXad(2)/100;
gyroWeight = (float)XXXXXXXXXad(3)/100;
GyroWeightPan = (float)XXXXXXXXXad(4)/100;
maxPulse = XXXXXXXXXad(5)+(XXXXXXXXXad(6)<<8);
servoPanCenter = XXXXXXXXXad(7)+(XXXXXXXXXad(8)<<8);
tiltFactor = (float)(XXXXXXXXXad(9)+(XXXXXXXXXad(10)<<8)) / 10;
panFactor = (float)(XXXXXXXXXad(11)+(XXXXXXXXXad(12)<<8)) / 10;
servoTiltCenter = XXXXXXXXXad(16)+(XXXXXXXXXad(17)<<8);
servoRollCenter = XXXXXXXXXad(18)+(XXXXXXXXXad(19)<<8);
panMaxPulse = XXXXXXXXXad(20)+(XXXXXXXXXad(21)<<8);
panMinPulse = XXXXXXXXXad(22)+(XXXXXXXXXad(23)<<8);
tiltMaxPulse = XXXXXXXXXad(24)+(XXXXXXXXXad(25)<<8);
tiltMinPulse = XXXXXXXXXad(26)+(XXXXXXXXXad(27)<<8);
rollMaxPulse = XXXXXXXXXad(28)+(XXXXXXXXXad(29)<<8);
rollMinPulse = XXXXXXXXXad(30)+(XXXXXXXXXad(31)<<8);
htChannels[0] = XXXXXXXXXad(32);
htChannels[1] = XXXXXXXXXad(33);
htChannels[2] = XXXXXXXXXad(34);
gyroOff[0] = XXXXXXXXXad(35)+(XXXXXXXXXad(36)<<8)-500;
gyroOff[1] = XXXXXXXXXad(37)+(XXXXXXXXXad(38)<<8)-500;
gyroOff[2] = XXXXXXXXXad(39)+(XXXXXXXXXad(40)<<8)-500;
tiltInverse = -1;
rollInverse = -1;
panInverse = -1;
if (XXXXXXXXXad(13) == 2) {
tiltInverse = 1;
}
if (XXXXXXXXXad(14) == 2) {
rollInverse = 1;
}
if (XXXXXXXXXad(15) == 2) {
panInverse = 1;
}
magOffset[0] = XXXXXXXXXad(200)+(XXXXXXXXXad(201)<<8)-2000;
magOffset[1] = XXXXXXXXXad(202)+(XXXXXXXXXad(203)<<8)-2000;
magOffset[2] = XXXXXXXXXad(204)+(XXXXXXXXXad(205)<<8)-2000;
accOffset[0] = XXXXXXXXXad(206)+(XXXXXXXXXad(207)<<8)-2000;
accOffset[1] = XXXXXXXXXad(208)+(XXXXXXXXXad(209)<<8)-2000;
accOffset[2] = XXXXXXXXXad(210)+(XXXXXXXXXad(211)<<8)-2000;
#if (DEBUG)
debugOutput();
#endif
}
void saveMagData() {
int temp;
temp = (int)(magOffset[0]+2000);
EEPROM.write(200,(unsigned char)temp);
EEPROM.write(201,(unsigned char)(temp>>8));
temp = (int)(magOffset[1]+2000);
EEPROM.write(202,(unsigned char)temp);
EEPROM.write(203,(unsigned char)(temp>>8));
temp = (int)(magOffset[2]+2000);
EEPROM.write(204,(unsigned char)temp);
EEPROM.write(205,(unsigned char)(temp>>8));
XXXXXXXXXintln("Mag-offset saved!");
}
void saveAccData() {
int temp;
temp = (int)(accOffset[0]+2000);
EEPROM.write(206,(unsigned char)temp);
EEPROM.write(207,(unsigned char)(temp>>8));
temp = (int)(accOffset[1]+2000);
EEPROM.write(208,(unsigned char)temp);
EEPROM.write(209,(unsigned char)(temp>>8));
temp = (int)(accOffset[2]+2000);
EEPROM.write(210,(unsigned char)temp);
EEPROM.write(211,(unsigned char)(temp>>8));
XXXXXXXXXintln("Acc-offset saved!");
XXXXXXXXXint(accOffset[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(accOffset[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(accOffset[2]);
}
void debugOutput() {
XXXXXXXXXintln();
XXXXXXXXXintln();
XXXXXXXXXintln();
XXXXXXXXXintln("------ Debug info------");
XXXXXXXXXint("tiltBeta: ");
XXXXXXXXXintln(tiltBeta);
XXXXXXXXXint("panBeta: ");
XXXXXXXXXintln(panBeta);
XXXXXXXXXint("gyroWeight: ");
XXXXXXXXXintln(gyroWeight);
XXXXXXXXXint("GyroWeightPan: ");
XXXXXXXXXintln(GyroWeightPan);
XXXXXXXXXint("servoPanCenter: ");
XXXXXXXXXintln(servoPanCenter);
XXXXXXXXXint("servoTiltCenter: ");
XXXXXXXXXintln(servoTiltCenter);
XXXXXXXXXint("servoRollCenter: ");
XXXXXXXXXintln(servoRollCenter);
XXXXXXXXXint("tiltFactor: ");
XXXXXXXXXintln(tiltFactor);
XXXXXXXXXint("panFactor: ");
XXXXXXXXXintln(panFactor);
XXXXXXXXXint("Gyro offset saved ");
XXXXXXXXXint(gyroOff[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(gyroOff[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(gyroOff[2]);
XXXXXXXXXint("Mag offset saved ");
XXXXXXXXXint(magOffset[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(magOffset[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(magOffset[2]);
XXXXXXXXXint("Acc offset saved ");
XXXXXXXXXint(accOffset[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(accOffset[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(accOffset[2]);
SensorInfoPrint();
}
接收机程序
//this programm will put out a PPM signal
//////////////////////CONFIGURATION///////////////////////////////
#define chanel_number 9 //set the number of chanels
#define default_servo_value 1500 //set the default servo value
#define PPM_FrLen 22500 //set the PPM frame length in microseconds (1ms = 1000μs)
#define PPM_PulseLen 300 //set the pulse length
#define onState 1 //set polarity of the pulses: 1 is positive, 0 is negative
#define sigPin 10 //set PPM signal output pin on the arduino
//////////////////////////////////////////////////////////////////
/*this array holds the servo values for the ppm signal
change theese values in your code (usually servo values move between 1000 and 2000)*/
int ppm[chanel_number];
unsigned int angs,ang1,ang2;
char xx;
void setup(){
XXXXXXXXXgin(9600);
//initiallize default ppm values
for(int i=0; i<chanel_number; i++){
ppm[i]= default_servo_value;
}
pinMode(sigPin, OUTPUT);
digitalWrite(sigPin, !onState); //set the PPM signal pin to the default state (off)
cli();
TCCR1A = 0; // set entire TCCR1 register to 0
TCCR1B = 0;
OCR1A = 100; // compare match register, change this
TCCR1B |= (1 << WGM12); // turn on CTC mode
TCCR1B |= (1 << CS11); // 8 prescaler: 0,5 microseconds at 16mhz
TIMSK1 |= (1 << OCIE1A); // enable timer compare interrupt
sei();
}
void loop(){
//put main code here
if (Serial.available()) {
angs=XXXXXXXXXrseInt(); //angs=ang1*180+ang2
ppm[1] = angs/180;
ppm[1] = map(ppm[1],1,179,1000,2000);
ppm[2] = angs%180;
ppm[2] = map(ppm[2],1,179,1000,2000);
}
//ang1=angs/180; ang2=angs%180;
xx++;
if(50<=xx)
{
ppm[0] = analogRead(A0);
ppm[0] = map(ppm[0],0,1023,1000,2000);
xx=0;
}
delayMicroseconds(200);
}
ISR(TIMER1_COMPA_vect){ //leave this alone
static boolean state = true;
TCNT1 = 0;
if(state) { //start pulse
digitalWrite(sigPin, onState);
OCR1A = PPM_PulseLen * 2;
state = false;
}
else{ //end pulse and calculate when to start the next pulse
static byte cur_chan_numb;
static unsigned int calc_rest;
digitalWrite(sigPin, !onState);
state = true;
if(cur_chan_numb >= chanel_number){
cur_chan_numb = 0;
calc_rest = calc_rest + PPM_PulseLen;//
OCR1A = (PPM_FrLen - calc_rest) * 2;
calc_rest = 0;
}
else{
OCR1A = (ppm[cur_chan_numb] - PPM_PulseLen) * 2;
calc_rest = calc_rest + ppm[cur_chan_numb];
cur_chan_numb++;
}
}
}
原概念是位老外Dennis Fire提出的,他的程序只写了头追的传感部分,输出的信号通过无人机的遥控器教练功能发射,不知道如何转蓝牙
发现他arduino语句有问题
因为煎饼还处于单片机跑马灯阶段,蓝牙更不懂,所以哪位程序猿帮我看看


头追程序
// Written by Dennis Frie - 2012
// Contact: XXXXXXXXXie@XXXXXXXXX
// Version 0.08
// Discussion:
// XXXXXXXXXXXXXXXXXXXXXXX/forums/XXXXXXXXXXXXXp?t=1677559
/*
Channel mapping/config for PPM out:
1 = PPM CHANNEL 1
2 = PPM CHANNEL 2
3 = PPM CHANNEL 3
4 = PPM CHANNEL 4
5 = PPM CHANNEL 5
6 = PPM CHANNEL 6
7 = PPM CHANNEL 7
8 = PPM CHANNEL 8
9 = PPM CHANNEL 9
10 = PPM CHANNEL 10
11 = PPM CHANNEL 11
12 = PPM CHANNEL 12
20 = ANALOG INPUT 0
21 = ANALOG INPUT 1
22 = ANALOG INPUT 2
23 = ANALOG INPUT 3
24 = ANALOG INPUT 4
25 = ANALOG INPUT 5
26 = ANALOG INPUT 6
27 = ANALOG INPUT 7
20 = DIGITAL INPUT 0
21 = DIGITAL INPUT 1
22 = DIGITAL INPUT 2
23 = DIGITAL INPUT 3
24 = DIGITAL INPUT 4
25 = DIGITAL INPUT 5
26 = DIGITAL INPUT 6
27 = DIGITAL INPUT 7
30 = HT pan
31 = HT tilt
32 = HT roll
Mapping example:
$123456789111CH
*/
#include <Wire.h>
#include "config.h"
#include "functions.h"
#include "sensors.h"
#include "ServoSupport.h"
#include <EEPROM.h>
extern unsigned char channel_mapping[];
extern unsigned char PpmIn_PpmOut[13];
extern char read_sensors;
extern long channel_value[];
extern float gyroOff[];
int counter =0; // Delay for serial-output.
char printPlot = 0; // print plot for GUI?
// External variables (from sensors.h):
extern float tiltBeta;
extern float panBeta;
extern float gyroWeight;
extern float GyroWeightPan;
extern int maxPulse;
extern int servoPanCenter;
extern int servoTiltCenter;
extern int servoRollCenter;
extern int panMaxPulse;
extern int panMinPulse;
extern int tiltMaxPulse;
extern int tiltMinPulse;
extern int rollMaxPulse;
extern int rollMinPulse;
extern float panFactor;
extern float tiltFactor;
extern float rollFactor;
extern char tiltInverse;
extern char rollInverse;
extern char panInverse;
extern float magOffset[];
extern int accOffset[];
extern unsigned char htChannels[];
extern char resetValues;
void setup() {
XXXXXXXXXgin(SERIAL_BAUD);
pinMode(7,OUTPUT);
pinMode(9,OUTPUT);
digitalWrite(2,HIGH);
digitalWrite(3,HIGH);
pinMode(0,INPUT);
pinMode(1,INPUT);
pinMode(2,INPUT);
pinMode(3,INPUT);
pinMode(6,INPUT);
pinMode(7,INPUT);
pinMode(8,INPUT);
//Set button pin to input:
pinMode(BUTTON_INPUT,INPUT);
//Set internal pull-up resistor.
digitalWrite(BUTTON_INPUT,HIGH);
digitalWrite(0,LOW); // pull-down resistor
digitalWrite(1,LOW);
digitalWrite(2,HIGH);
digitalWrite(3,HIGH);
XXXXXXXgin(); // Start I2C
// If the device have just been programmed, write initial config/values to EEPROM:
if (XXXXXXXXXad(0) != 8) {
// #if (DEBUG)
XXXXXXXXXintln("New board - saving default values!");
// #endif
init_sensors();
#if (ALWAYS_CAL_GYRO ==0)
setSensorOffset();
#endif
save Settings();
saveMagData();
saveAccData();
EEPROM.write(0,8);
}
getSettings(); // Get settings saved in EEPROM
init_sensors(); // Initialise I2C sensors
calMag();
resetCenter();
init_timer_interrupt(); // Start timer interrupt (for sensors)
ServoSupport::Init();
ServoSupport::SetAng(1,9,90);
ServoSupport::SetAng(2,10,90);
ServoSupport::SetAng(3,8,90);
ServoSupport::Start();
}
char serial_data[101]; // Array for serial-data
unsigned char serial_index =0; // How many bytes have been received?
char string_started = 0; // Only saves data if string starts with right byte
char outputMag = 0;
char outputAcc = 0;
void loop() {
// Check button
if (digitalRead(BUTTON_INPUT)==0) {
resetValues = 1;
}
// All this is used for communication with GUI
if (Serial.available()) {
if (string_started == 1) {
// Read incoming byte
serial_data[serial_index++] = XXXXXXXXXad();
// If string ends with 'CH" it's channel configuration, that have been received.
// String must always be 12 chars/bytes and ending with CH to be valid.
if (serial_data[serial_index-2] == 'C' && serial_data[serial_index-1] == 'H' && serial_index == 14) {
// To keep it simple, we will not let the channels be 0-initialised, but start from 1 to match actual channels.
for (unsigned char i=0; i<13; i++) {
channel_mapping[i+1] = serial_data[i]-48;
// Update the dedicated PPM-in -> PPM-out array for faster performance.
if (serial_data[i]-48 < 14) {
// PpmIn_PpmOut[i+1] = serial_data[i]-48;
PpmIn_PpmOut[serial_data[i]-48] =i+1;
}
}
XXXXXXXXXintln("Channel mapping received");
// Reset serial_index and serial_started
serial_index=0;
string_started = 0;
}
if (serial_data[serial_index-2] == 'H' && serial_data[serial_index-1] == 'E') {
// We need 8 parameters:
// LP_tilt
// LP_pan
// Gyro_weight_tilt
// Gyro_weight_pan
// servo_max
// servo_min
// tilt_servo_gain
// pan_servo_gain
XXXXXXXXXintln("HT config received:");
/*
for (unsigned char k = 0; k< 10; k++) {
valuesReceived[k] =0;
}
*/
int valuesReceived[20] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
int comma_index =0;
for (unsigned char k = 0; k < serial_index-2; k++) {
// Looking for comma
if (serial_data[k] == 44) {
comma_index++;
}
else {
valuesReceived[comma_index] = valuesReceived[comma_index]*10 + (serial_data[k]-48);
}
// Mainly for debug:
#if (DEBUG)
XXXXXXXXXint(serial_data[k]);
#endif
}
#if (DEBUG)
XXXXXXXXXintln();
for (unsigned char k = 0; k < comma_index+1; k++) {
XXXXXXXXXint(valuesReceived[k]);
XXXXXXXXXint(",");
}
XXXXXXXXXintln();
#endif
tiltBeta = (float)valuesReceived[0] / 100;
panBeta = (float)valuesReceived[1] / 100;
gyroWeight = (float)valuesReceived[2] / 100;
GyroWeightPan = (float)valuesReceived[3] / 100;
tiltFactor = (float)valuesReceived[4] / 10;
panFactor = (float)valuesReceived[5] / 10;
rollFactor = (float)valuesReceived[6] / 10;
tiltInverse = 1;
rollInverse = 1;
panInverse = 1;
if (valuesReceived[7] / 100 == 1) {
panInverse = -1;
valuesReceived[7]-=100;
}
if (valuesReceived[7] / 10 == 1) {
rollInverse = -1;
valuesReceived[7]-=10;
}
if (valuesReceived[7] / 1 == 1) {
tiltInverse = -1;
}
serial_index=0;
string_started = 0;
servoPanCenter = valuesReceived[8];
panMinPulse = valuesReceived[9];
panMaxPulse = valuesReceived[10];
servoTiltCenter = valuesReceived[11];
tiltMinPulse = valuesReceived[12];
tiltMaxPulse = valuesReceived[13];
servoRollCenter = valuesReceived[14];
rollMinPulse = valuesReceived[15];
rollMaxPulse = valuesReceived[16];
htChannels[0] = valuesReceived[17];
htChannels[1] = valuesReceived[18];
htChannels[2] = valuesReceived[19];
XXXXXXXXXintln(htChannels[0]);
XXXXXXXXXintln(htChannels[1]);
XXXXXXXXXintln(htChannels[2]);
save Settings();
}
// Debug info
else if (serial_data[serial_index-5] == 'D' && serial_data[serial_index-4] == 'E' && serial_data[serial_index-3] == 'B' && serial_data[serial_index-2] == 'U' && serial_data[serial_index-1] == 'G') {
debugOutput();
serial_index=0;
string_started = 0;
}
// Start magnetometer cal
else if (serial_data[serial_index-4] == 'C' && serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'S' && serial_data[serial_index-1] == 'T') {
outputMag = 1;
serial_index=0;
string_started = 0;
}
// Start accelerometer cal
else if (serial_data[serial_index-4] == 'G' && serial_data[serial_index-3] == 'R' && serial_data[serial_index-2] == 'A' && serial_data[serial_index-1] == 'V') {
outputAcc = 1;
serial_index=0;
string_started = 0;
}
// Stop magnetometer cal
else if (serial_data[serial_index-4] == 'C' && serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'E' && serial_data[serial_index-1] == 'N') {
outputMag = 0;
serial_index=0;
string_started = 0;
}
// Stop accelerometer cal
else if (serial_data[serial_index-4] == 'G' && serial_data[serial_index-3] == 'R' && serial_data[serial_index-2] == 'E' && serial_data[serial_index-1] == 'N') {
outputAcc = 0;
serial_index=0;
string_started = 0;
}
// Start plotting if PLST received:
else if (serial_data[serial_index-4] == 'P' && serial_data[serial_index-3] == 'L' && serial_data[serial_index-2] == 'S' && serial_data[serial_index-1] == 'T') {
printPlot = 1;
serial_index=0;
string_started = 0;
}
// Stop plotting if PLEN received:
else if (serial_data[serial_index-4] == 'P' && serial_data[serial_index-3] == 'L' && serial_data[serial_index-2] == 'E' && serial_data[serial_index-1] == 'N') {
printPlot = 0;
serial_index=0;
string_started = 0;
}
// Save settings
else if (serial_data[serial_index-4] == 'S' && serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'V' && serial_data[serial_index-1] == 'E') {
save Settings();
serial_index=0;
string_started = 0;
}
//Calibrate gyro
else if (serial_data[serial_index-4] == 'C' && serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'L' && serial_data[serial_index-1] == 'I') {
setSensorOffset();
saveSsttings();
XXXXXXXXXint("Gyro offset measured:");
XXXXXXXXXint(gyroOff[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(gyroOff[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(gyroOff[2]);
serial_index=0;
string_started = 0;
}
else if (serial_data[serial_index-2] == 'M' && serial_data[serial_index-1] == 'A') {
XXXXXXXXXintln(serial_data);
int valuesReceived[5] = {0,0,0,0,0};
int comma_index =0;
for (unsigned char k = 0; k < serial_index-2; k++) {
// Looking for comma
if (serial_data[k] == 44) {
comma_index++;
}
else {
valuesReceived[comma_index] = valuesReceived[comma_index]*10 + (serial_data[k]-48);
}
}
magOffset[0] = valuesReceived[0]-2000;
magOffset[1] = valuesReceived[2]-2000;
magOffset[2] = valuesReceived[1]-2000;
saveMagData();
}
else if (serial_data[serial_index-3] == 'A' && serial_data[serial_index-2] == 'C' && serial_data[serial_index-1] == 'C') {
XXXXXXXXXintln(serial_data);
int valuesReceived[5] = {0,0,0,0,0};
int comma_index =0;
for (unsigned char k = 0; k < serial_index-3; k++) {
// Looking for comma
if (serial_data[k] == 44) {
comma_index++;
}
else {
valuesReceived[comma_index] = valuesReceived[comma_index]*10 + (serial_data[k]-48);
}
}
accOffset[0] = valuesReceived[0]-2000;
accOffset[1] = valuesReceived[1]-2000;
accOffset[2] = valuesReceived[2]-2000;
saveAccData();
}
// If more than 100 bytes have been received, the string is not valid. Reset and "try again" (wait for $ to indicate start of new string).
else if (serial_index > 100) {
serial_index = 0;
string_started = 0;
}
}
else if (XXXXXXXXXad() == '$') {
string_started = 1;
}
}
// if "read_sensors" flag is set high, read sensors and update
if (read_sensors == 1) {
updateSensors();
gyroCalc();
accCalc();
magCalc();
filter();
if (counter++ >7) {
// testGyroOutput();
// testMagOutput();
// quickTest();
if (printPlot == 1) {
headtrackerOutput();
}
else if (outputMag) {
calMagOutput();
}
else if (outputAcc) {
calAccOutput();
}
counter=0;
}
// Will first update read_sensors when everything's done.
read_sensors = 0;
}
}
void saveSettings() {
// This is the necessary head-tracler settings:
/*
tiltBeta = (float)valuesReceived[0] / 100;
panBeta = (float)valuesReceived[1] / 100;
gyroWeight = (float)valuesReceived[2] / 100;
GyroWeightPan = (float)valuesReceived[3] / 100;
maxPulse = valuesReceived[4];
servoCenter = valuesReceived[5];
tiltFactor = (float)valuesReceived[6] / 10;
panFactor = (float)valuesReceived[7] / 10;
*/
// Chars
EEPROM.write(1,(unsigned char) (tiltBeta*100));
EEPROM.write(2,(unsigned char) (panBeta*100));
EEPROM.write(3,(unsigned char) (gyroWeight*100));
EEPROM.write(4,(unsigned char) (GyroWeightPan*100));
// And some integers
EEPROM.write(5,(unsigned char)maxPulse);
EEPROM.write(6,(unsigned char)(maxPulse>>8));
EEPROM.write(7,(unsigned char)servoPanCenter);
EEPROM.write(8,(unsigned char)(servoPanCenter>>8));
EEPROM.write(9,(unsigned char) (tiltFactor*10));
EEPROM.write(10,(int)((tiltFactor*10))>>8);
EEPROM.write(11,(unsigned char) (panFactor*10));
EEPROM.write(12,(int)((panFactor*10))>>8);
// Channel inverse settings:
EEPROM.write(13,(unsigned char)(tiltInverse+1));
EEPROM.write(14,(unsigned char)(rollInverse+1));
EEPROM.write(15,(unsigned char)(panInverse+1));
EEPROM.write(16,(unsigned char)servoTiltCenter);
EEPROM.write(17,(unsigned char)(servoTiltCenter>>8));
EEPROM.write(18,(unsigned char)servoRollCenter);
EEPROM.write(19,(unsigned char)(servoRollCenter>>8));
EEPROM.write(20,(unsigned char)panMaxPulse);
EEPROM.write(21,(unsigned char)(panMaxPulse>>8));
EEPROM.write(22,(unsigned char)panMinPulse);
EEPROM.write(23,(unsigned char)(panMinPulse>>8));
EEPROM.write(24,(unsigned char)tiltMaxPulse);
EEPROM.write(25,(unsigned char)(tiltMaxPulse>>8));
EEPROM.write(26,(unsigned char)tiltMinPulse);
EEPROM.write(27,(unsigned char)(tiltMinPulse>>8));
EEPROM.write(28,(unsigned char)rollMaxPulse);
EEPROM.write(29,(unsigned char)(rollMaxPulse>>8));
EEPROM.write(30,(unsigned char)rollMinPulse);
EEPROM.write(31,(unsigned char)(rollMinPulse>>8));
EEPROM.write(32,(unsigned char)htChannels[0]);
EEPROM.write(33,(unsigned char)htChannels[1]);
EEPROM.write(34,(unsigned char)htChannels[2]);
// Saving gyro calibration values
int temp = (int)(gyroOff[0]+500.5);
EEPROM.write(35,(unsigned char)temp);
EEPROM.write(36,(unsigned char)(temp>>8));
temp = (int)(gyroOff[1]+500.5);
EEPROM.write(37,(unsigned char)temp);
EEPROM.write(38,(unsigned char)(temp>>8));
temp = (int)(gyroOff[2]+500.5);
EEPROM.write(39,(unsigned char)temp);
EEPROM.write(40,(unsigned char)(temp>>8));
XXXXXXXXXintln("Settings saved!");
}
void getSettings() {
tiltBeta = (float)XXXXXXXXXad(1)/100;
panBeta = (float)XXXXXXXXXad(2)/100;
gyroWeight = (float)XXXXXXXXXad(3)/100;
GyroWeightPan = (float)XXXXXXXXXad(4)/100;
maxPulse = XXXXXXXXXad(5)+(XXXXXXXXXad(6)<<8);
servoPanCenter = XXXXXXXXXad(7)+(XXXXXXXXXad(8)<<8);
tiltFactor = (float)(XXXXXXXXXad(9)+(XXXXXXXXXad(10)<<8)) / 10;
panFactor = (float)(XXXXXXXXXad(11)+(XXXXXXXXXad(12)<<8)) / 10;
servoTiltCenter = XXXXXXXXXad(16)+(XXXXXXXXXad(17)<<8);
servoRollCenter = XXXXXXXXXad(18)+(XXXXXXXXXad(19)<<8);
panMaxPulse = XXXXXXXXXad(20)+(XXXXXXXXXad(21)<<8);
panMinPulse = XXXXXXXXXad(22)+(XXXXXXXXXad(23)<<8);
tiltMaxPulse = XXXXXXXXXad(24)+(XXXXXXXXXad(25)<<8);
tiltMinPulse = XXXXXXXXXad(26)+(XXXXXXXXXad(27)<<8);
rollMaxPulse = XXXXXXXXXad(28)+(XXXXXXXXXad(29)<<8);
rollMinPulse = XXXXXXXXXad(30)+(XXXXXXXXXad(31)<<8);
htChannels[0] = XXXXXXXXXad(32);
htChannels[1] = XXXXXXXXXad(33);
htChannels[2] = XXXXXXXXXad(34);
gyroOff[0] = XXXXXXXXXad(35)+(XXXXXXXXXad(36)<<8)-500;
gyroOff[1] = XXXXXXXXXad(37)+(XXXXXXXXXad(38)<<8)-500;
gyroOff[2] = XXXXXXXXXad(39)+(XXXXXXXXXad(40)<<8)-500;
tiltInverse = -1;
rollInverse = -1;
panInverse = -1;
if (XXXXXXXXXad(13) == 2) {
tiltInverse = 1;
}
if (XXXXXXXXXad(14) == 2) {
rollInverse = 1;
}
if (XXXXXXXXXad(15) == 2) {
panInverse = 1;
}
magOffset[0] = XXXXXXXXXad(200)+(XXXXXXXXXad(201)<<8)-2000;
magOffset[1] = XXXXXXXXXad(202)+(XXXXXXXXXad(203)<<8)-2000;
magOffset[2] = XXXXXXXXXad(204)+(XXXXXXXXXad(205)<<8)-2000;
accOffset[0] = XXXXXXXXXad(206)+(XXXXXXXXXad(207)<<8)-2000;
accOffset[1] = XXXXXXXXXad(208)+(XXXXXXXXXad(209)<<8)-2000;
accOffset[2] = XXXXXXXXXad(210)+(XXXXXXXXXad(211)<<8)-2000;
#if (DEBUG)
debugOutput();
#endif
}
void saveMagData() {
int temp;
temp = (int)(magOffset[0]+2000);
EEPROM.write(200,(unsigned char)temp);
EEPROM.write(201,(unsigned char)(temp>>8));
temp = (int)(magOffset[1]+2000);
EEPROM.write(202,(unsigned char)temp);
EEPROM.write(203,(unsigned char)(temp>>8));
temp = (int)(magOffset[2]+2000);
EEPROM.write(204,(unsigned char)temp);
EEPROM.write(205,(unsigned char)(temp>>8));
XXXXXXXXXintln("Mag-offset saved!");
}
void saveAccData() {
int temp;
temp = (int)(accOffset[0]+2000);
EEPROM.write(206,(unsigned char)temp);
EEPROM.write(207,(unsigned char)(temp>>8));
temp = (int)(accOffset[1]+2000);
EEPROM.write(208,(unsigned char)temp);
EEPROM.write(209,(unsigned char)(temp>>8));
temp = (int)(accOffset[2]+2000);
EEPROM.write(210,(unsigned char)temp);
EEPROM.write(211,(unsigned char)(temp>>8));
XXXXXXXXXintln("Acc-offset saved!");
XXXXXXXXXint(accOffset[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(accOffset[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(accOffset[2]);
}
void debugOutput() {
XXXXXXXXXintln();
XXXXXXXXXintln();
XXXXXXXXXintln();
XXXXXXXXXintln("------ Debug info------");
XXXXXXXXXint("tiltBeta: ");
XXXXXXXXXintln(tiltBeta);
XXXXXXXXXint("panBeta: ");
XXXXXXXXXintln(panBeta);
XXXXXXXXXint("gyroWeight: ");
XXXXXXXXXintln(gyroWeight);
XXXXXXXXXint("GyroWeightPan: ");
XXXXXXXXXintln(GyroWeightPan);
XXXXXXXXXint("servoPanCenter: ");
XXXXXXXXXintln(servoPanCenter);
XXXXXXXXXint("servoTiltCenter: ");
XXXXXXXXXintln(servoTiltCenter);
XXXXXXXXXint("servoRollCenter: ");
XXXXXXXXXintln(servoRollCenter);
XXXXXXXXXint("tiltFactor: ");
XXXXXXXXXintln(tiltFactor);
XXXXXXXXXint("panFactor: ");
XXXXXXXXXintln(panFactor);
XXXXXXXXXint("Gyro offset saved ");
XXXXXXXXXint(gyroOff[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(gyroOff[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(gyroOff[2]);
XXXXXXXXXint("Mag offset saved ");
XXXXXXXXXint(magOffset[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(magOffset[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(magOffset[2]);
XXXXXXXXXint("Acc offset saved ");
XXXXXXXXXint(accOffset[0]);
XXXXXXXXXint(",");
XXXXXXXXXint(accOffset[1]);
XXXXXXXXXint(",");
XXXXXXXXXintln(accOffset[2]);
SensorInfoPrint();
}
接收机程序
//this programm will put out a PPM signal
//////////////////////CONFIGURATION///////////////////////////////
#define chanel_number 9 //set the number of chanels
#define default_servo_value 1500 //set the default servo value
#define PPM_FrLen 22500 //set the PPM frame length in microseconds (1ms = 1000μs)
#define PPM_PulseLen 300 //set the pulse length
#define onState 1 //set polarity of the pulses: 1 is positive, 0 is negative
#define sigPin 10 //set PPM signal output pin on the arduino
//////////////////////////////////////////////////////////////////
/*this array holds the servo values for the ppm signal
change theese values in your code (usually servo values move between 1000 and 2000)*/
int ppm[chanel_number];
unsigned int angs,ang1,ang2;
char xx;
void setup(){
XXXXXXXXXgin(9600);
//initiallize default ppm values
for(int i=0; i<chanel_number; i++){
ppm[i]= default_servo_value;
}
pinMode(sigPin, OUTPUT);
digitalWrite(sigPin, !onState); //set the PPM signal pin to the default state (off)
cli();
TCCR1A = 0; // set entire TCCR1 register to 0
TCCR1B = 0;
OCR1A = 100; // compare match register, change this
TCCR1B |= (1 << WGM12); // turn on CTC mode
TCCR1B |= (1 << CS11); // 8 prescaler: 0,5 microseconds at 16mhz
TIMSK1 |= (1 << OCIE1A); // enable timer compare interrupt
sei();
}
void loop(){
//put main code here
if (Serial.available()) {
angs=XXXXXXXXXrseInt(); //angs=ang1*180+ang2
ppm[1] = angs/180;
ppm[1] = map(ppm[1],1,179,1000,2000);
ppm[2] = angs%180;
ppm[2] = map(ppm[2],1,179,1000,2000);
}
//ang1=angs/180; ang2=angs%180;
xx++;
if(50<=xx)
{
ppm[0] = analogRead(A0);
ppm[0] = map(ppm[0],0,1023,1000,2000);
xx=0;
}
delayMicroseconds(200);
}
ISR(TIMER1_COMPA_vect){ //leave this alone
static boolean state = true;
TCNT1 = 0;
if(state) { //start pulse
digitalWrite(sigPin, onState);
OCR1A = PPM_PulseLen * 2;
state = false;
}
else{ //end pulse and calculate when to start the next pulse
static byte cur_chan_numb;
static unsigned int calc_rest;
digitalWrite(sigPin, !onState);
state = true;
if(cur_chan_numb >= chanel_number){
cur_chan_numb = 0;
calc_rest = calc_rest + PPM_PulseLen;//
OCR1A = (PPM_FrLen - calc_rest) * 2;
calc_rest = 0;
}
else{
OCR1A = (ppm[cur_chan_numb] - PPM_PulseLen) * 2;
calc_rest = calc_rest + ppm[cur_chan_numb];
cur_chan_numb++;
}
}
}
原概念是位老外Dennis Fire提出的,他的程序只写了头追的传感部分,输出的信号通过无人机的遥控器教练功能发射,不知道如何转蓝牙
200字以内,仅用于支线交流,主线讨论请采用回复功能。