


我觉得导弹防御就免了。。。。。做一个雷达防半夜查房的老妈和老师最好是可以连接手机用。。不用电脑
59943
%7B%22isLastPage%22%3Atrue%2C%22notes%22%3A%5B%5D%2C%22pid%22%3A%22t59943%22%2C%22tid%22%3A%2259943%22%2C%22mainForumsId%22%3A%5B%2237%22%5D%2C%22categoriesId%22%3A%5B%2250%22%5D%2C%22tcId%22%3A%5B%5D%7D
%7B%22isEditMode%22%3Afalse%7D
用arduino制做超声波雷达
先看这贴
[创新资料]自制USB雷达 ------------ 架设你自己的导弹防御系统
XXXXXXXXXXXXXXXXXXXXXXXX/t/54197
之后查找了资料 发现有processing编写的上位机
于是:
所需材料:arduino控制板(mini版需要转usb)、步进电机及驱动板 、SR04之类的超声波测距模块、电脑一台。
![130822-130548.jpg]()
![130822-130703.jpg]()
![130822-130638.jpg]()
arduino说明:
vcc 接D2 TRIG接 D3 ECHO接 D4 GND接D5
![捕获5.png]()
程序不带步进电机部分(我手头的电机很奇怪 五根线 测量其电阻关系很奇葩。。你要按情况加上)
上位机程序用的processing(你可以不下载processing,我编译出来windows 32的可执行程序)
串口发来一个信号扫描一帧 所以最好用步进电机
串口要是用我编译好的需要改成最靠前的串口。。图上的com4是对于我机子而言的
![捕获3.png]()
![捕获7.png]()
固定模块手渐渐远离
![捕获.png]()
文件![捕获6.png]()
![捕获2.png]()
[创新资料]自制USB雷达 ------------ 架设你自己的导弹防御系统
XXXXXXXXXXXXXXXXXXXXXXXX/t/54197
之后查找了资料 发现有processing编写的上位机
于是:
所需材料:arduino控制板(mini版需要转usb)、步进电机及驱动板 、SR04之类的超声波测距模块、电脑一台。
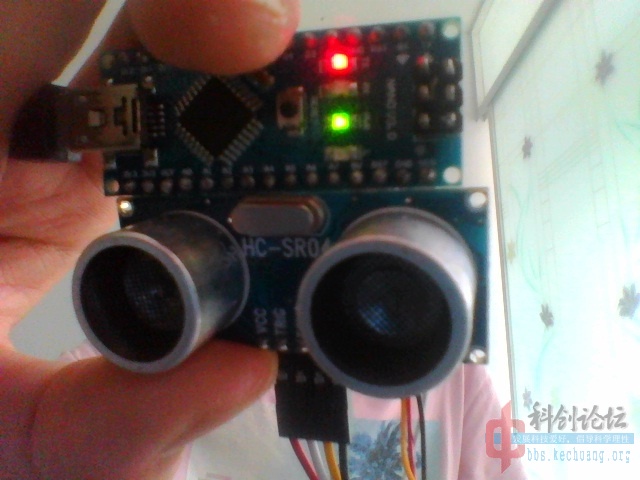

arduino说明:
vcc 接D2 TRIG接 D3 ECHO接 D4 GND接D5

程序不带步进电机部分(我手头的电机很奇怪 五根线 测量其电阻关系很奇葩。。你要按情况加上)
上位机程序用的processing(你可以不下载processing,我编译出来windows 32的可执行程序)
串口发来一个信号扫描一帧 所以最好用步进电机
串口要是用我编译好的需要改成最靠前的串口。。图上的com4是对于我机子而言的


固定模块手渐渐远离

文件


arduino
串口发数据要用 Serial.write!!
processing
下载 5.44 MB 百度网盘 :
在等几分钟
还是算了 论坛上传 百度网盘 115网盘都不能上传。。。
需要java支持
processing下载
XXXXXXXXXXXXXXXXXXXX/share/link?shareid=1480590828&uk=3608661149
串口发数据要用 Serial.write!!
processing
下载 5.44 MB 百度网盘 :
在等几分钟
还是算了 论坛上传 百度网盘 115网盘都不能上传。。。
需要java支持
processing下载
XXXXXXXXXXXXXXXXXXXX/share/link?shareid=1480590828&uk=3608661149
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 1楼(badboy-fly) 的帖子
红外热式传感器 +315收发(接口需要用俩三极管转换电平)+你想要的[s:274]
成本低
或者直接红外激光来回反射 再返回来(隐蔽)
成本低
或者直接红外激光来回反射 再返回来(隐蔽)
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 3楼(布布卡) 的帖子
问题是手机的软件。。。是个难题啊!我不会说我现在还不会编程。。。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

arduino——这个翻译成中文是不是 安卓 的意思啊?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 4楼(badboy-fly) 的帖子
用手机不一定是最好的方案 1传输问题(距离 成本等等)2体积安装隐蔽性 3待机时间 4丢失成本5手机系统。。。。。。
如果用红外热释传感器+315遥控(不对码 发射端用一个较高频率的音频振荡器调制) 感应到后接收端收到震荡信号 放大后给喇叭(音量 频率调好后穿透力极弱 可以达到门外听不见。。年龄大对高频不感冒) 成本低 可多间宿舍“共享”[s:274]
processing 可以编译出安卓程序
见XXXXXXXXXXXXXXXXXXXXXXXXXX/w/Android(研究了一段时间也没研究明白[s:275]) 以processing android可以搜出一大些相关资料
具体安卓上只干过用蓝牙串口通信( 这个十分简单 就是 arduino上接上蓝牙模块 安卓上打开蓝牙串口软件 选好端口。。之后发送接收数据。。[s:275] )可以到安卓开发论坛问问 XXXXXXXXXXXXXX
另外编程还是简单学学 很有意思 比如上面这个程序 其实就是画直线和红点 。。
如果用红外热释传感器+315遥控(不对码 发射端用一个较高频率的音频振荡器调制) 感应到后接收端收到震荡信号 放大后给喇叭(音量 频率调好后穿透力极弱 可以达到门外听不见。。年龄大对高频不感冒) 成本低 可多间宿舍“共享”[s:274]
processing 可以编译出安卓程序
见XXXXXXXXXXXXXXXXXXXXXXXXXX/w/Android(研究了一段时间也没研究明白[s:275]) 以processing android可以搜出一大些相关资料
具体安卓上只干过用蓝牙串口通信( 这个十分简单 就是 arduino上接上蓝牙模块 安卓上打开蓝牙串口软件 选好端口。。之后发送接收数据。。[s:275] )可以到安卓开发论坛问问 XXXXXXXXXXXXXX
另外编程还是简单学学 很有意思 比如上面这个程序 其实就是画直线和红点 。。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 6楼(布布卡) 的帖子
我的想法是不是这样啊……我是想以那个火箭弹为基础将电脑监控移到手机上……然后去掉发射台用来做雷达监控周围移动的物体……
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 7楼(badboy-fly) 的帖子
这个东西现在只是玩具级。。超声测距没精度没速度的 上午买了片线性ccd 尝试做激光测距 (同样做好后一改就成二维激光雷达)
移到手机上 应该是可以的 不过我没成功(需要下的软件挺多)现在在安卓模式出错。
![捕获.png]()
移到手机上 应该是可以的 不过我没成功(需要下的软件挺多)现在在安卓模式出错。

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 8楼(布布卡) 的帖子
哇!感觉好复杂啊!
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
话说我的步进电机也是5根线的..........
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 10楼(yurifreeman) 的帖子
驱动成功了 随便接上就转了。。
安卓上也尝试了一下 编了个小程序运行了(按照XXXXXXXXXXXXXXXXXXXXXXXXXX/w/Android一步步操作) 但是不能用串口。。。晕死 晕死。。。
安卓上也尝试了一下 编了个小程序运行了(按照XXXXXXXXXXXXXXXXXXXXXXXXXX/w/Android一步步操作) 但是不能用串口。。。晕死 晕死。。。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
我也做了个试了一下,但是不知为什么processing运行时没有出现图上的那个绿圈..........
代码完全是复制粘贴过去的,应该没问题,但是为什么会出现这种情况?
代码完全是复制粘贴过去的,应该没问题,但是为什么会出现这种情况?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 12楼(yurifreeman) 的帖子
截图 processing下方 选对com口了吗?
![捕获.png]()
将com口对应编号写在代码里
另外arduino串口发送数据时才能不断绘图

将com口对应编号写在代码里
另外arduino串口发送数据时才能不断绘图
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
现在尝试激光雷达 先要完成激光测距模块 先要完成线阵ccd模块 先要完成ccd的电路
搭好了电路 下一步尝试用一片51单片机产生时钟信号并完成信号二值化![130824-181931.jpg]()
搭好了电路 下一步尝试用一片51单片机产生时钟信号并完成信号二值化

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 13楼(布布卡) 的帖子
额................确实搞错了.............
又试了一下,不知为何达不到图上的效果,distance的那个地方一直是0
又试了一下,不知为何达不到图上的效果,distance的那个地方一直是0
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 15楼(yurifreeman) 的帖子
arduino部分咋么布置的?安装测距模块了吗?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 15楼(yurifreeman) 的帖子
要不然现将arduino中最后面的 Serial.write(echocm); 改为 XXXXXXXXXintln(echocm); 先用自带的串口查看是否返回正确的距离值(单位厘米)
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 16楼(布布卡) 的帖子
照着图上装的。后来想测试一下模块是不是坏了,但是以前编的程序找不着了........... [s:275]
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 17楼(布布卡) 的帖子
用此方法试过了,distance卡在48就不动了.........
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 19楼(yurifreeman) 的帖子
刚才出去了趟
卡在48就不动了,1你是用的什么程序看的 2你的源代码发上来我看一看
卡在48就不动了,1你是用的什么程序看的 2你的源代码发上来我看一看
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 20楼(布布卡) 的帖子
1:processing
2:arduino代码,自己稍改了一下
const int TrigPin = 3;
const int EchoPin = 4;
float SR04cm;
float m;
float dis=0;
float dis2=0;
float SR04()
{
digitalWrite
(TrigPin, LOW);
delayMicroseconds(2);
digitalWrite(TrigPin, HIGH);
delayMicroseconds(12);
digitalWrite(TrigPin, LOW);
SR04cm = pulseIn(EchoPin, HIGH) / 58.00; //算成厘米 //
SR04cm = (int(m * 100.0)) / 100.0; //保留两位小数
delayMicroseconds(2);return SR04cm;}
void setup()
{
XXXXXXXXXgin(9600);
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT);
}
void loop()
{
int echocm=SR04();
XXXXXXXXXintln(echocm);
delay(10);
}
processing代码,没改过
import XXXXXXXXXXXXXrial.*;
Serial myPort=new Serial(this, XXXXXXXXXst()[1], 9600);
float r=250;
float a=0;
float x, y;
void setup()
{
size(600, 600);
background(0);
smooth();
stroke(255);
frameRate(100);
println(XXXXXXXXXst());
}
void draw()
{
displayX();
displayY();
fill(0,3);
noStroke();
rect(0, 0, width, height);
x=r*cos(a);
y=r*sin(a);
if (myPort.available()>0)
{
int data;
data=XXXXXXXXXad();
fill(255);
text("DISTANCE:", 30, 50);
text(data, 100, 50);
stroke(0, 200, 0);
strokeWeight(4);
line(width/2, height/2, width/2+x, height/2+y);//步进电机转一下,扫描线转一下
a=a+0.0124;//弧度增加
if (data<=50)
{
stroke(255, 0, 0);
strokeWeight(10);
float locx, locy;
locx=5*(data-1)*cos(a);
locy=5*(data-1)*sin(a);
point(width/2+locx, height/2+locy);
}
}
}
void displayX()
{
for (int i=-250;i<300;i+=50)
{
fill(255);
if (i<=0)
text(i, i+300, 300);
else
text(i, i+285, 300);
}
}
void displayY()
{
for (int i=250;i>=-250;i-=50)
{
if (i!=0)
{
fill(255);
text(i, 300, 300-i);
}
}
}
截图:
![QQ图片20130824204751.jpg]()
![]()
![]()
2:arduino代码,自己稍改了一下
const int TrigPin = 3;
const int EchoPin = 4;
float SR04cm;
float m;
float dis=0;
float dis2=0;
float SR04()
{
digitalWrite
(TrigPin, LOW);
delayMicroseconds(2);
digitalWrite(TrigPin, HIGH);
delayMicroseconds(12);
digitalWrite(TrigPin, LOW);
SR04cm = pulseIn(EchoPin, HIGH) / 58.00; //算成厘米 //
SR04cm = (int(m * 100.0)) / 100.0; //保留两位小数
delayMicroseconds(2);return SR04cm;}
void setup()
{
XXXXXXXXXgin(9600);
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT);
}
void loop()
{
int echocm=SR04();
XXXXXXXXXintln(echocm);
delay(10);
}
processing代码,没改过
import XXXXXXXXXXXXXrial.*;
Serial myPort=new Serial(this, XXXXXXXXXst()[1], 9600);
float r=250;
float a=0;
float x, y;
void setup()
{
size(600, 600);
background(0);
smooth();
stroke(255);
frameRate(100);
println(XXXXXXXXXst());
}
void draw()
{
displayX();
displayY();
fill(0,3);
noStroke();
rect(0, 0, width, height);
x=r*cos(a);
y=r*sin(a);
if (myPort.available()>0)
{
int data;
data=XXXXXXXXXad();
fill(255);
text("DISTANCE:", 30, 50);
text(data, 100, 50);
stroke(0, 200, 0);
strokeWeight(4);
line(width/2, height/2, width/2+x, height/2+y);//步进电机转一下,扫描线转一下
a=a+0.0124;//弧度增加
if (data<=50)
{
stroke(255, 0, 0);
strokeWeight(10);
float locx, locy;
locx=5*(data-1)*cos(a);
locy=5*(data-1)*sin(a);
point(width/2+locx, height/2+locy);
}
}
}
void displayX()
{
for (int i=-250;i<300;i+=50)
{
fill(255);
if (i<=0)
text(i, i+300, 300);
else
text(i, i+285, 300);
}
}
void displayY()
{
for (int i=250;i>=-250;i-=50)
{
if (i!=0)
{
fill(255);
text(i, 300, 300-i);
}
}
}
截图:

引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 21楼(yurifreeman) 的帖子
arduino 的源代码有问题复制时估计 “//”错位了。。
之后有个变量m 在SR04中重写了上一句的数值(保留两位小数那句)
用这个(直接在processing用)

之后有个变量m 在SR04中重写了上一句的数值(保留两位小数那句)
用这个(直接在processing用)
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 23楼(yurifreeman) 的帖子
其实是我粘代码时格式出了点问题 粘乱了 现在编辑了。删了些调试时留下的无用语句
ps 论坛上传好慢。。。5mb文件传不上来 我用的无线网络 难道无线网络上传很慢?
ps 论坛上传好慢。。。5mb文件传不上来 我用的无线网络 难道无线网络上传很慢?
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
关于步进电机(用6 7 8 9口) 要在setup()中加入
for(int i=6;i<=9;i++)
{
pinMode(i,OUTPUT);
}
for(int i=6;i<=9;i++)
{
digitalWrite(i,1);
}
}
再在 loop() 中加入步进一步的代码
for(int i=6;i<=9;i++)
{
digitalWrite(i,0);
delay(5); //改小了电机快 但太小了就成震动了。。
digitalWrite(i,1);
}
for(int i=6;i<=9;i++)
{
pinMode(i,OUTPUT);
}
for(int i=6;i<=9;i++)
{
digitalWrite(i,1);
}
}
再在 loop() 中加入步进一步的代码
for(int i=6;i<=9;i++)
{
digitalWrite(i,0);
delay(5); //改小了电机快 但太小了就成震动了。。
digitalWrite(i,1);
}
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。


回 27楼(gurite) 的帖子
这个看测距模块 并且要在程序中改数值
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

Re:回 28楼(布布卡) 的帖子
引用第28楼布布卡于2013-08-25 11:26发表的 回 27楼(gurite) 的帖子 :
这个看测距模块 并且要在程序中改数值
考虑试试这个
XXXXXXXXXXXXXXXXXXXXXX/XXXXXXXm?spm=XXXXXXXXXXXXXXXXdF6B&id=13735440810&initiative_new=1
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 29楼(奇侠) 的帖子
要精度和距离就用激光测距 2000左右 这种看过 学校里机器车使得就是这种( 不过是模拟输出0-5v 稳定性好200一个[s:275])
sr04 才六元。价格差16倍
注SR04参数:
探测距离:2cm-450cm
精度:0.3cm
sr04 才六元。价格差16倍
注SR04参数:
探测距离:2cm-450cm
精度:0.3cm
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

超声波测距模块做不了雷达啊.. 那玩意测到是扇面内距离最近的物体的距离
除非用基恩士的300kHz频率超声波的那种,声波扩散角只有1度左右,不过测的距离就近很多,量程只有1m
除非用基恩士的300kHz频率超声波的那种,声波扩散角只有1度左右,不过测的距离就近很多,量程只有1m
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。
回 31楼(10班陈大葱22号) 的帖子
大体玩玩可以的 的确有时还发生声波反射不回来的问题
另外lcd现在还没驱动 arduino太慢。。4017分频波形也有问题
想用stm32(放学校了[s:275])jlink之前还烧了[s:273]。。后天开学[s:225]。。。作业没写[s:226]。。。
另外lcd现在还没驱动 arduino太慢。。4017分频波形也有问题
想用stm32(放学校了[s:275])jlink之前还烧了[s:273]。。后天开学[s:225]。。。作业没写[s:226]。。。
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

回 5楼(xldfs) 的帖子
应该是安德鲁,前一阵子在学的
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。



引用 yurifreeman:5线 4相的···步进·
话说我的步进电机也是5根线的..........
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

手机超声波processing代码
<code class="lang-text">// Proje Hocam - Radar Projesi
// Murat DURAN - V2
import processing.serial.*; // kütüphane entegresi
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1166, 500);
smooth();
myPort = new Serial(this,"COM3", 9600); // Com portunu se?in
myPort.bufferUntil('.');
}
void draw() {
fill(98,245,31);
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // ye?il renk
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) {
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(",");
angle= data.substring(0, index1);
distance= data.substring(index1+1, data.length());
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(683,700);
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1300,1300,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,700,700,PI,TWO_PI);
arc(0,0,400,400,PI,TWO_PI);
// draws the angle lines
line(-700,0,700,0);
line(0,0,-700*cos(radians(30)),-700*sin(radians(30)));
line(0,0,-700*cos(radians(60)),-700*sin(radians(60)));
line(0,0,-700*cos(radians(90)),-700*sin(radians(90)));
line(0,0,-700*cos(radians(120)),-700*sin(radians(120)));
line(0,0,-700*cos(radians(150)),-700*sin(radians(150)));
line(-700*cos(radians(30)),0,700,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(683,700);
strokeWeight(9);
stroke(255,10,10); // k?rm?z? renk
pixsDistance = iDistance*22.5;
// 40 cm ye kadar ?l?er
if(iDistance<40){ line(pixsdistance*cos(radians(iangle)),-pixsdistance*sin(radians(iangle)),700*cos(radians(iangle)),-700*sin(radians(iangle))); } popmatrix(); void drawline() { pushmatrix(); strokeweight(9); stroke(30,250,60); translate(683,700); line(0,0,700*cos(radians(iangle)),-700*sin(radians(iangle))); drawtext() if(idistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, 1010, width, 1080);
fill(98,245,31);
textSize(25);
text("10cm",800,690);
text("20cm",950,690);
text("30cm",1100,690);
text("40cm",1250,690);
textSize(40);
text("Object: " + noObject, 240, 1050);
text("Angle: " + iAngle +" °", 1050, 1050);
text("Distance: ", 1380, 1050);
if(iDistance<40) { text(" " + idistance +" cm", 1400, 1050); } textsize(25); fill(98,245,60); translate(390+960*cos(radians(30)),780-960*sin(radians(30))); rotate(-radians(-60)); text("30°",0,0); resetmatrix(); translate(490+960*cos(radians(60)),920-960*sin(radians(60))); rotate(-radians(-30)); text("60°",0,0); translate(630+960*cos(radians(90)),990-960*sin(radians(90))); rotate(radians(0)); text("90°",0,0); translate(760+960*cos(radians(120)),1000-960*sin(radians(120))); rotate(radians(-38)); text("120°",0,0); translate(840+900*cos(radians(150)),920-960*sin(radians(150))); rotate(radians(-60)); text("150°",0,0); popmatrix(); }< code></40)></40){></code>
引用
加载评论中,请稍候...
200字以内,仅用于支线交流,主线讨论请采用回复功能。

布布卡
 学者 机友 笔友
学者 机友 笔友
200字以内,仅用于支线交流,主线讨论请采用回复功能。